При автоматизированном
производстве производительность
является одним из основных
технико-экономических факторов. В
пределах планового фонда времени работы
можно выделить следующие периоды
времени:
-
выполняется
заданное технологическое воздействие
(рабочие ходы оборудования); -
выполняются
вспомогательные перемещения необходимые
для выполнения технологического
процесса (холостые ходы оборудования); -
оборудование
выпускает бракованную продукцию; -
оборудование
простаивает в связи со сбоем в
технологическое системе (сбои в системе
СПИД); -
оборудование
простаивает по внешним организационным
причинам.
Производительным
является только первый период времени
и для него и определяется технологическая
производительность.
Производительность
определяется количеством годных деталей,
изделий, комплектов, выпускаемых машиной
в единицу времени. Время обработки
детали машиной является обратной
величиной производительности.
При расчете, анализе
и оценке производительности
автоматизированного оборудования с
учетом различных затрат времени
используют четыре вида производительности:
технологическую, цикловую, техническую
и фактическую.
1.
Технологическая
производительность
К представляет собой потенциальную
производительность, которая определяется
из идеальных условий, отсутствия холостых
ходов и простоев. Технологическая
производительность находится по формуле
1.1.
![]() ,
,
[шт/час], (1.1)
где
tр
– время рабочих ходов.
В
случае одновременной обработки нескольких
деталей на одном автомате время рабочего
хода tр,
независимо от конструкции станка, будет
определятся по формуле 1.2:
![]() , (1.2)
, (1.2)
где tΣр
– суммарное время технологического
воздействия на заготовку;
n
– количество одновременно обрабатываемых
деталей.
Технологическая
производительность – это максимальная
теоретическая производительность при
условии бесперебойной работы машины и
обеспечения ее всем необходимым.
2.
Цикловая
производительность QЦ
характеризует
возможность выпуска продукции при
реальном конструктивном воплощении и
возможности бесперебойной работы
оборудования. Цикловая производительность
находится по формуле 1.3.
![]() ,
,
[шт/ч], (1.3)
где tх
– время холостых ходов;
tв
– вспомогательное время;
В
сумме время рабочих и холостых ходов
составляет время рабочего цикла Трц.
Поэтому формула для определения цикловой
производительности будет иметь вид:
![]() (1.4)
(1.4)
В зависимости от
конструкции станка время рабочего цикла
будет определятся по разному. Формулы
для определения времени рабочего цикла
представлены в таблице 1.
Таблица 1
Схемы построения
технологических процессов станков
|
№ п/п |
Схема |
Вид обработки |
Время цикла, |
|
1 |
2 |
3 |
4 |
|
1 |
|
Однопозиционная |
|
|
2 |
|
Многопозиционная |
|
|
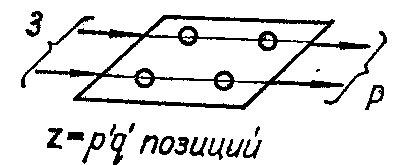
3 |
|
Многопозиционная параллельная |
|
|
4 |
|
Многопозиционная параллельно-последовательная |
|
|
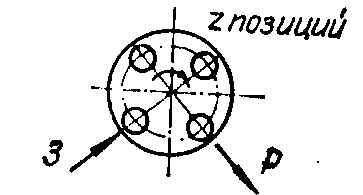
5 |
|
Многопозиционная роторная |
|



Продолжение
таблицы 1
|
1 |
2 |
3 |
4 |
|
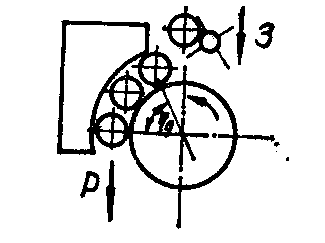
6 |
|
Многопозиционная непрерывная |
|
|
Примечания: qиp– соответственно |
3.
Техническая
производительность
QТ
характеризует возможность выпуска
продукции с учетом надежности оборудования.
Техническая производительность находится
по формуле 1.5.
![]() , (1.5)
, (1.5)
где
ΣtС
– время собственных потерь; простоев,
связанных со сменой, подналадкой
оборудования, ожиданием наладчика и
т.д., простои из-за отказов в работе,
поломок; простои из-за переналадок
станка на производство других деталей;
простои из-за нарушения заданного
качества изделий.
В
сумме время рабочих и холостых ходов
составляет время рабочего цикла Трц.
Поэтому формула для определения
технической производительности будет
иметь вид:
![]() (1.6)
(1.6)
Это
теоретическая производительность
машины с реальными холостыми ходами и
с учетом ее собственных простоев ΣtС,
связанных с выходом из строя инструментов,
приспособлений, оборудования.
4.
Фактическая
производительность
QФ
характеризует возможность выпуска
продукции с учетом всех возможных
простоев оборудования. Фактическая
производительность находится по формуле
1.7.
![]() (1.7)
(1.7)
где
ΣtОРГ
– время простоев по организационно-техническим
причинам, не связанных с работой
оборудования (например, простои из-за
отсутствия заготовок, электроэнергии,
простоев станков предыдущей обработки,
несвоевременного прихода и ухода рабочих
и т.д.).
В
сумме время рабочих и холостых ходов
составляет время рабочего цикла Трц.
Поэтому формула для определения
технической производительности будет
иметь вид:
![]() (1.8)
(1.8)
Сумма
собственных и организационных потерь
составляет время внецикловых потерь
(формула 1.9):
ΣtВН
= ΣtС
+ ΣtОРГ, (1.9)
где
ΣtВН
– внецикловые потери.
Тогда
фактическая производительность будет
определятся по формуле 1.10:
![]() (1.10)
(1.10)
Задача
1. Автоматическая
сборочная установка круговой тактовой
конструкции имеет 8 позиций (n
= 8). Стол поворачивается с помощью
мальтийского механизма, у которого
кривошип вращается с частотой n
= 30 об/мин. Какова технологическая
производительность установки К?
Каково
время рабочих ходов? Каково суммарное
время технологического воздействия на
одну деталь tΣр
?
Решение.
За каждый поворот кривошипа стол
перемещается на одну позицию, поэтому
на выходе получается одно готовое
изделие, значит технологическая
производительность будет равна К
= 30 шт./мин.
Технологическая
производительность находится согласно
формуле 1.1:
![]() ,
,
где
tр
– время рабочих ходов, т.е. тот промежуток
времени, через который будет каждый раз
получать будем получать готовое изделие.
Из формулы следует,
что время рабочих ходов определяется
по формуле:
![]() [с/шт].
[с/шт].
Суммарное
время технологического воздействия на
заготовку – это время, за которое изделие
пройдет все позиции сборочного автомата
находится по формуле 1.11:
![]() , (1.11)
, (1.11)
где
n
– число рабочих позиций
tΣр
= 2 · 8 = 16 (c).
Задача
2. Определить
время рабочего цикла
6-ти позиционного
автомата параллельно-последовательной
обработки. При условии, что время
обработки на одной позиции составляет
3,2 мин., а время холостых ходов – 1,6 мин.
Задача
3. Определить
время рабочего цикла
6-ти позиционного
роторного автомата. При условии, что
время обработки на одной позиции
составляет 3,2 мин., а время холостых
ходов – 1,6 мин.
Задача
4. Определить
технологическую, цикловую, техническую
и фактическую производительность 6-ти
позиционного автомата с параллельной
обработкой. При условии, что время
обработки на одной позиции составляет
2.4 мин, время холостого хода – 0.9 мин,
время на установку и снятие детали 0,8
мин, время собственных и внецикловых
потерь составляет соответственно 5% и
10% от времени рабочего цикла.
Решение.
Технологическая производительности
находится согласно формуле 1.1:
![]()
Для
нашей задачи время рабочего хода
составляет 2,4 мин., но так как станок –
автомат параллельной обработки, то
одновременно на станке обрабатывается
6 деталей, и через каждые 2,4 мин получаем
6 обработанных деталей. Технологическая
производительность будет равна
![]() [шт./час]
[шт./час]
Цикловая
производительность находится по формуле
1.4:
![]()
Время
рабочего хода и время холостого хода
составляют время цикла работы станка
автомата. Время рабочего цикла для
6-шпиндельного станка автомата
параллельного действия находится по
формуле 1.12 (Приложение 1):
![]() , (1.12)
, (1.12)
где
tΣр
– суммарное время технологического
воздействия на заготовку;
tх
– время холостых ходов;
р
– число параллельно работающих позиций.
![]() [мин.]
[мин.]
Цикловая
производительность будет равна
![]() [шт./час]
[шт./час]
Техническая
производительность находится по формуле
1.6:
![]()
Время
собственных потерь составляет 2% от
времени работы цикла.
![]() [шт./час]
[шт./час]
Фактическая
производительность находится по формуле
1.10:
![]()
Внецикловые
потери составляют 5% от времени работы
цикла станка.
![]() [шт./час]
[шт./час]
Задача
5. Определить
технологическую, цикловую, техническую
и фактическую производительность 6-ти
позиционного автомата с последовательной
обработкой. При условии, что время
обработки на одной позиции составляет
3,2 мин, время холостого хода – 1,5 мин,
время собственных и внецикловых потерь
составляет соответственно 5% и 10% от
времени рабочего цикла.
Задача
6. Автоматическая
сборочная линия состоит из тридцати
последовательно соединенных позиций
(n
= 30). Линия оснащена качающимся штанговым
конвейером с тактом tх
= 4 c
и выстоем tр
= 20 c.
Каждая позиция будет работать без сбоев
с вероятностью р1
= 0,999, если
в бункере находятся только качественные
детали. Любой некачественный компонент
вызовет заклинивание на позиции, что
приведет к перебою в работе всей линии,
поскольку межпозиционные накопители
не предусмотрены. На устранение сбоя
или заедания требуется время t1
= 10 мин.
Решая задачу, необходимо ответить на 3
вопроса:
а)
Отсутствие
сбоев. Какова
цикловая производительность линии Qц?
Каково суммарное время технологического
воздействия на заготовку t∑р?
Решение.
Продолжительность цикла складывается
из времени такта tх
(время холостых ходов) и времени выстоя
tр
(время рабочих ходов) (формула 1.13)
![]() (1.13)
(1.13)
Трц
= 4 + 20 = 24
(c).
Цикловая
производительность – это производительность
без учета каких-либо простоев, находится
согласно формуле 1.4:
![]()
tв
= 0 мин,
Qц
= 3600/24 = 150
(изделий/час).
Суммарное
время технологического воздействия на
заготовку – это время за которое изделие
проходит все 30 позиций сборочной
автоматической линии:
t∑р
= 30 · 24 = 720
(с) = 12 (мин).
б)
Сбои сборочных
устройств на позициях.
Какова техническая производительность
линии QТ?
Какую долю составляет время простоев
D?
Каково суммарное время технологического
воздействия на заготовку с учетом того,
что сбои сборочных устройств имеют
место t∑р?
Решение.
Техническая производительность – это
производительность с учетом того, что
оборудование на линии выходит из строя.
Вероятность безотказной работы
автоматической сборочной линии будет
равна вероятности безотказной работы
одного сборочного автомата в степени
равной количеству сборочных автоматов
в данной линии:
р1
= 0,99930
= 0,9704;
вероятность
отказа
р2
= 1 — 0,9704 =
0,0296;
Определим
время, затрачиваемое на сборку 9704 изделий
(N1
= 9704), t2
(формула 1.14), при суммарном времени
безотказной работы t∑р9704
и времени на устранение отказов tС
(время собственных потерь). Количество
отказов при сборке 9704 изделий будет
равно N2
= 296.
![]() (1.14)
(1.14)
t2
= 9704
·
24 / 3600 + 296 ·
10 / 60 = 64,69 + 49,33 = 114,02 (час).
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
- Введение
- Условия и значения ВТХ
- Графики ВТХ
- Условия испытания. Поправочные коэффициенты
-
Введение
Как известно автоматические выключатели могут иметь следующие виды расцепителей обеспечивающих защиту электрической цепи от сверхтоков: электромагнитный — защищающий сеть от коротких замыканий, тепловой — обеспечивающий защиту от токов перегрузки и комбинированный представляющий собой совокупность электромагнитного и теплового расцепителя (подробнее читайте статью «автоматические выключатели«).
Примечание: Современные автоматические выключатели предназначенные для защиты электрических сетей до 1000 Вольт имеют, как правило, комбинированные расцепители.
Расцепители автоматических выключателей — это исполнительные механизмы которые обеспечивают отключение (расцепление) электрической цепи при возникновении в ней тока выше допустимого, причем чем больше это превышение тем быстрее должно произойти расцепление.
Зависимость времени расцепления автоматического выключателя от величины проходящего через него тока и называется время-токовой характеристикой или сокращенно — ВТХ.
-
Условия и значения ВТХ
ВТХ автоматов определяются следующими значениями:
1) Ток мгновенного расцепления — минимальное значение тока, вызывающее автоматическое срабатывание выключателя без преднамеренной выдержки времени. (ГОСТ Р 50345-2010, п. 3.5.17)
Примечание: срабатывание без преднамеренной выдержки времени обеспечивается электромагнитным расцепителем автомата.
Ток мгновенного расцепления определяется так называемой «характеристикой расцепления» или как ее еще называют — характеристика срабатывания.
Согласно ГОСТ Р 50345-2010 существуют следующие типы характеристик срабатывания автоматических выключателей:

Примечание: существуют так же и другие, нестандартные типы характеристик, о них мы говорили в статье «автоматические выключатели«.
Как видно из таблицы выше ток мгновенного расцепления указывается в виде диапазона значений, например характеристика «B» предполагает, что автомат обеспечит мгновенное расцепление при протекании через него тока в 3 — 5 раз превышающего его номинальный ток, т.е. если автоматический выключатель с данной характеристикой имеет номинальный ток 16 Ампер, то он обеспечит мгновенное расцепление при токе от 48 до 80 Ампер.
Определить характеристику срабатывания автоматического выключателя, как правило, можно по маркировке нанесенной на его корпусе:

2) Условный ток нерасцепления — установленное значение тока, который автоматический выключатель способен проводить, не срабатывая, в течение заданного (условного) времени*. (ГОСТ Р 50345-2010, п. 3.5.15) Согласно пункту 8.6.2.2 ГОСТ Р 50345-2010 условный ток нерасцепления равен 1,13 номинального тока автомата.
3) Условный ток расцепления — установленное значение тока, которое вызывает срабатывание автоматического выключателя в течение заданного (условного) времени*. (ГОСТ Р 50345-2010, п. 3.5.16) Согласно пункту 8.6.2.3 ГОСТ Р 50345-2010 условный ток расцепления равен 1,45 номинального тока автомата.
* Условное время равно 1 ч для выключателей с номинальным током до 63 А включительно и 2 ч с номинальным током свыше 63 А. (ГОСТ Р 50345-2010, п.8.6.2.1)
Время-токовая характеристика автоматического выключателя определяется условиями и значениями приведенными в таблице 7 ГОСТ Р 50345-2010:

Примечание: Таблица действительна для автоматов, смонтированных в соответствии с условиями испытаний приведенными ниже работающих при температуре 30+5 °С
-
Графики ВТХ
Для удобства производителями в паспортах на автоматические выключатели время-токовые характеристики указываются в виде графика где по оси X откладывается кратность тока электрической цепи к номинальному току автомата (I/In), а по оси Y время срабатывания расцепителя.
Для подробного рассмотрения в качестве примера возьмем график ВТХ для автоматического выключателя с характеристикой «B»
ПРИМЕЧАНИЕ: Все приведенные ниже графики предоставлены в качестве примера. У различных производителей графики ВТХ могут отличаться (смотрите в паспорте автомата), однако они в любом случае должны соответствовать требованиям ГОСТ Р 50345-2010 и в частности значениям указанным в таблице 7 приведенной выше.

Как видно график ВТХ представлен двумя кривыми: первая кривая (красная) — это характеристика автомата в так называемом «горячем» состоянии, т.е. автомата находящегося в работе, вторая (синяя) — характеристика автомата в «холодном» состоянии, т.е. автомата через который только начал протекать электрический ток.
При этом синяя кривая имеет дополнительно штриховую линию, эта линия показывает характеристику автомата (его теплового расцепителя) с номинальным током до 32 Ампер, это различие в характеристиках автоматов с номиналами до и выше 32 Ампер обусловлено тем, что в автоматах с большим номинальным током биметаллическая пластина теплового расцепителя имеет большее сечение и соответственно ей необходимо больше времени что бы разогреться.
Кроме того каждая кривая имеет два участка: первый — показывающий плавное изменение времени срабатывания в зависимости от тока электрической цепи является характеристикой теплового расцепителя, второй — показывающий резкое снижение времени срабатывания (при токе от 3 In в горячем состоянии и от 5 In в холодном состоянии ), является характеристикой электромагнитного расцепителя автоматического выключателя.

Как видно, на графике ВТХ отмечены основные значения характеристик автомата согласно ГОСТ Р 50345-2010 при 1.13In (Условный ток нерасцепления) автомат не сработает в течении 1-2 часов, а при токе в 1,45 In (Условный ток расцепления) автомат отключит цепь за время менее 50 секунд (из горячего состояния).
Как уже было сказано выше ток мгновенного расцепления определяется характеристикой срабатывания автомата, у автоматических выключателей с характеристикой «B» он составляет от 3In до 5In, при этом согласно вышеуказанному ГОСТу (таблице 7) при 3In автомат не должен сработать за время менее 0,1 секунды из холодного состояния, но должен отключиться за время менее 0,1 секунды из холодного состояния при токе в цепи 5In и как мы можем увидеть из графика выше данное условие выполняется.
Так же по время-токовой характеристике можно определить время срабатывания автомата при любых других значениях тока, например: в цепи установлен автомат с характеристикой «B» и номинальным током 16 Ампер, при работе в данной цепи произошла перегрузка и ток вырос до 32 ампер, определяем время срабатывания автомата следующим образом:
- Делим ток протекающий в цепи на номинальный ток автомата
32А/16А=2
Определив что ток в цепи в два раза больше номинала автомата, т.е. составляет 2In откладываем данное значение по оси X графика и поднимая от нее условную линию вверх смотрим где она пересекается с кривыми графика:

Как мы видим из графика при токе 32 Ампера автомат с номинальным током 16 Ампер разомкнет цепь за время менее 10 секунд — из горячего состояния и за время менее 5 минут — из холодного состояния.
Приведем примеры ВТХ автоматических выключателей всех стандартных характеристик срабатывания (B, C, D):



ПРИМЕЧАНИЕ: Время-токовые характеристики согласно ГОСТ Р 50345-2010 указываются для автоматов работающих при температуре +30+5 оC смонтированных в соответствии с определенными условиями:
-
Условия испытания. Поправочные коэффициенты.
Согласно ГОСТ Р 50345-2010 При испытаниях выключатели устанавливают отдельно, вертикально, на открытом воздухе в месте, защищенном от чрезмерного внешнего нагрева или охлаждения.
испытания автоматических выключателей проводят при любой температуре воздуха, а результаты корректируют по температуре +30 °С на основании поправочных коэффициентов, предоставленных изготовителем.
При этом в любом случае отклонение испытательного тока от указанного в таблице 7 не должно превышать 1,2% на 1 °С изменения температуры калибровки.
Изготовитель должен подготовить данные по изменению характеристики расцепления для температур калибровки, отличных от контрольного значения.
Таким образом, что бы точно узнать время отключения автоматических выключателей, эксплуатируемых при условиях отличающихся от условий испытания необходимо воспользоваться поправочными коэффициентами которые должен предоставить изготовитель данных выключателей.
Приведем пример таких поправочных коэффициентов (обычно их всего 2):
- Температурный коэффициент (Кt)
Температурный коэффициент учитывает отличие температуры окружающей среды при которой автоматический выключатель испытывался от фактической температуры окружающей среды при которой он эксплуатируется:

Как видно из графика, чем ниже температура окружающей среды тем выше данный коэффициент. Объясняется это просто — чем ниже температура окружающей среды, тем больший ток должен протекать через автоматический выключатель что бы нагреть расцепитель до температуры необходимой для его срабатывания.
- Коэффициент, учитывающий количество установленных рядом автоматов (Кn)
Как было сказано выше, автоматические выключатели при их испытании устанавливаются отдельно, однако на практике они устанавливаются в электрических щитах в один ряд с другими автоматами, что соответственно ухудшает их охлаждение за счет ухудшения циркуляции воздуха и тепла от установленных рядом выключателей:

Соответственно, как и можно увидеть из графика, чем больше рядом установлено автоматов, тем меньше данный коэффициент.
Зная поправочные коэффициенты можно скорректировать номинальный ток автомата в зависимости от условий его эксплуатации.
Например: имеется автоматический выключатель с номинальным током 16 Ампер установленный в щитке с 5 другими автоматами при температуре окружающего воздуха +10оC.
- По графикам выше найдем поправочные коэффициенты:
- Кt=1,05
- Кn=0,8
- Зная поправочные коэффициенты скорректируем номинальный ток автомата:
In/= In* Кt* Кn=16*1.05*0.8=13.44 Ампер
Соответственно при эксплуатации автоматического выключателя в вышеуказанных условиях для определения времени его срабатывания необходимо принимать ток не 16 Ампер, а 13,44 Ампера.
Была ли Вам полезна данная статья? Или может быть у Вас остались вопросы? Пишите в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
↑ Наверх
Что такое время-токовые характеристики автоматических выключателей
При нормальной работе электросети и всех приборов через автоматический выключатель (далее по тексту — автомат) протекает допустимый электрический ток. Однако, если сила тока по каким-либо причинам превысила номинальные значения, происходит размыкание цепи из-за срабатывания расцепителей автоматического выключателя.
Характеристика срабатывания автоматического выключателя является очень важной характеристикой, которая описывает то, насколько время срабатывания автоматического выключателя зависит от отношения силы тока, протекающего через автомат, к номинальному току автомата.
Данная характеристика сложна тем, что для ее выражения необходимо использование графиков. Автоматы с одним и тем же номиналом будут при разных превышениях тока по-разному отключаться в зависимости от типа кривой токовой характеристики автомата, благодаря чему имеется возможность применять автоматы с разной характеристикой для разных типов нагрузки.
Тем самым, с одной стороны, осуществляется защитная токовая функция, а с другой стороны, обеспечивается минимальное количество ложных срабатываний – в этом и заключается важность данной характеристики.
В энергетических отраслях бывают ситуации, когда кратковременное увеличение тока не связано с появлением аварийного режима и защита не должно реагировать на такие изменения. Это же относится и к автоматам.
При включении какого-нибудь мотора, к примеру, дачного насоса или пылесоса, в линии происходит достаточно большой бросок тока, который в несколько раз превышает нормальный.
По логике работы, автомат, конечно же, должен отключиться. К примеру, мотор потребляет в пусковом режиме 12 А, а в рабочем – 5 А. Автомат стоит на 10 А, и при значении 12 А он должен отключиться. Что в таком случае делать? Если, например поставить автомат номиналом на 16 А, тогда непонятно отключится он или нет если заклинит мотор или замкнет кабель.
Можно было бы решить эту проблему, если его поставить на меньший ток, но тогда он будет срабатывать от любого движения. Вот для этого и было придумано такое понятие для автомата, как его «время-токовая характеристика».
Какие существуют время токовые характеристики автоматических выключателей и их отличие между собой
Как известно, основными органами срабатывания автоматического выключателя являются тепловой и электромагнитный расцепитель. Тепловой расцепитель представляет собой пластину из биметалла, изгибающуюся при нагреве протекающим током. Тем самым в действие приводится механизм расцепления, при длительной перегрузке срабатывая, с обратнозависимой выдержкой времени. Нагрев биметаллической пластинки и время срабатывание расцепителя напрямую зависят от уровня перегрузки.
Электромагнитный расцепитель является соленоидом с сердечником, магнитное поле соленоида при определенном токе втягивает сердечник, приводящий в действие механизм расцепления – происходит мгновенное срабатывание при КЗ (Коротком замыкании), благодаря чему пострадавший участок сети не будет дожидаться разогрева теплового расцепителя (биметаллической пластины) в автомате.
Зависимость времени срабатывания автомата от силы тока, протекающего через автомат, как раз и определяется время-токовой характеристикой автоматического выключателя.
Наверное, каждый замечал изображение латинских букв B, C, D на корпусах модульных автоматов. Так вот, они характеризуют кратность уставки электромагнитного расцепителя к номиналу автомата, обозначая его время-токовую характеристику.

Эти буквы указывают ток мгновенного срабатывания электромагнитного расцепителя автомата. Проще говоря, характеристика срабатывания автоматического выключателя показывает чувствительность автомата – наименьший ток при котором автомат отключится мгновенно.
Автоматы имеют несколько характеристик, самыми распространенными из которых являются:
· — B — от 3 до 5хIn;
· — C — от 5 до 10хIn;
· — D — от 10 до 20хIn.
Что означают цифры указанные выше?
Приведем небольшой пример: допустим, есть два автомата равные по номинальному току, но характеристики срабатывания (латинские буквы на автомате) разные: автоматы В16 и С16.
Диапазоны срабатывания электромагнитного расцепителя для В16 составляет 16*(3…5)=48…80А. Для С16 диапазон токов мгновенного срабатывания 16*(5…10)=80…160А.
При токе 100 А автомат В16 отключится практически мгновенно, в то время как С16 отключится не сразу а через несколько секунд от тепловой защиты (после того как нагреется его биметаллическая пластина).
В жилых зданиях и квартирах, где нагрузки чисто активные (без больших пусковых токов), самыми чувствительными и предпочтительными к применению являются автоматы с характеристикой B. На сегодняшний день очень распространена характеристика С, которую также можно использовать для жилых и административных зданий.
Что касается характеристики D, то она как раз годится для питания каких-либо электромоторов, больших двигателей и других устройств, где могут быть при их включении большие пусковые токи. Также через пониженную чувствительность при КЗ автоматы с характеристикой D могут быть рекомендованы для использования как вводные для повышения шансов селективности со стоящими ниже групповыми автоматами при КЗ.



Согласитесь, логично, что время срабатывания зависит от температуры автомата. Автомат отключится быстрее, если его тепловой орган (биметаллическая пластина) разогретый. И наоборот при первом включении когда биметалл автомата холодный время отключения будет больше.
Поэтому на графике верхняя кривая характеризует холодное состояние автомата, нижняя кривая характеризует горячее состояние автомата.
На рисунках пунктирная линия – это верхняя граница время-токовой характеристики для автоматических выключателей с номинальным током In меньше или равно 32 A.
Что показано на графике время-токовой характеристики
На примере 16-и Амперного автомата, имеющего время токовую характеристику C, попробуем рассмотреть характеристики срабатывания автоматических выключателей.

На графике можно увидеть, как протекающий через автоматический выключатель ток влияет на зависимость времени его отключения. Кратность тока протекающего в цепи к номинальному току автомата (I/In) изображает ось Х, а время срабатывания, в секундах – ось У.
Выше говорилось, что в состав автомата входит электромагнитный и тепловой расцепитель. Поэтому график можно разделить на два участка. Крутая часть графика показывает защиту от перегрузки (работа теплового расцепителя), а более пологая часть защиту от КЗ (работа электромагнитного расцепителя).
Как видно на графике, если к автомату С16 подключить нагрузку 23 А то он должен отключится за 60 сек. То есть при возникновении перегрузки на 45 % автомат отключится через 60 сек.

На токи большой величины, которые могут привести к повреждению изоляции электропроводки автомат способен реагировать мгновенно благодаря наличию электромагнитного расцепителя.
При прохождении через автомат С16 тока 5хIn (80 А) он должен сработать через 0.02 сек (это если автомат горячий). В холодном состоянии, при такой нагрузке, он отключится в пределах 11 сек. и 25 сек. (для автоматов до 32 А и выше 32 А соответственно).
Если через автомат будет протекать ток равный 10хIn, то он отключается за 0,03 секунды в холодном состоянии или меньше чем за 0,01 секунду в горячем.
К примеру, при коротком замыкании в цепи, которая защищена автоматом С16, и возникновении тока в 320 Ампер, диапазон времени отключения автомата будет составлять от 0,008 до 0,015 секунды. Это позволит снять питание с аварийной цепи и защитить от возгорания и полного разрушения сам автомат, закоротивший электроприбор и электропроводку.
Автоматы с какими характеристиками предпочтительнее использовать дома
В квартирах по возможности необходимо обязательно применять автоматы категории B, которые являются более чувствительными. Данный автомат отработает от перегрузки так же, как и автомат категории С.
|
|

Макеты страниц
Вернемся к рассмотрению простейшего электромеханического реле. В гл. II мы считали его мгновенно действующим. В действительности же реле срабатывает с небольшим запаздыванием  . Это значит, что выход (состояние контактов
. Это значит, что выход (состояние контактов  ) и вход (наличие тока в обмотке X)
) и вход (наличие тока в обмотке X)
 . хотя и являются логическими переменными (т. е. могут принимать лишь значения 0 и 1), но связаны временной зависимостью
. хотя и являются логическими переменными (т. е. могут принимать лишь значения 0 и 1), но связаны временной зависимостью

Если разбить ось непрерывного времени равномерно на такты  . и считать, что вход изменяется и выход наблюдается лишь в эти моменты, то получим
. и считать, что вход изменяется и выход наблюдается лишь в эти моменты, то получим

т. е. реле) является элементарным автоматом типа «задержка на такт», работающим в тактности  .
.
Если соединить контакты в сеть для получения любой логической функции в соответствии с методами гл. II, то такая сеть реализует в действительности не «мгновенную» функцию

а автомат

работающий в той же тактности  .
.
Рассмотрим теперь цепочку, составленную из реле так, что нормально-разомкнутый контакт каждого предыдущего реле замыкает обмотку следующего реле (рис. 5.11). Входом всей цепочки служит ток в обмотке первого реле, выходом — замыкание контакта  последнего реле. Такая цепочка описывается соотношениями
последнего реле. Такая цепочка описывается соотношениями

Рис. 5.11.

или

образуя типичный автомат без петель — линию задержки на  тактов.
тактов.

Рис. 5.12.
Построим теперь автомат с петлей, включив обмотку первого реле линии задержки в цепь контакта последнего реле, т. е. замкнем цепь задержки обратной связью (рис. 5.12). Напомним, что все реле имеют нормально-разомкнутые контакты. После любого начального состояния контактов этот автомат, работая в «тактности  », переходит в одно из двух возможных устойчивых состояний (все контакты замкнуты или все контакты разомкнуты) и далее не меняет его.
», переходит в одно из двух возможных устойчивых состояний (все контакты замкнуты или все контакты разомкнуты) и далее не меняет его.
Если же сделать контакт первого реле нормальнозамкнутым, а остальные оставить нормально-разомкну-тыми, то будет происходить. непрерывное циклическое переключение контактов. На графе такого автомата все состояния замкнуты в цикл. В частности, именно так работает пульс-пара, схема которой изображена на рис. 5.13. Любая релейно-контактная схема при таком рассмотрении образует автомат, работающий в указанной выше тактности  . Как показывают приведенные примеры, при этом могут быть образованы как автоматы без петель (пример — линия задержки, показанная на рис. 5,11), так и автоматы с петлями (пример на рис. 5.12 и 5.13). Имеет смысл говорить лишь об автономных автоматах такого рода, так как предположение, что и вход меняется в тактности
. Как показывают приведенные примеры, при этом могут быть образованы как автоматы без петель (пример — линия задержки, показанная на рис. 5,11), так и автоматы с петлями (пример на рис. 5.12 и 5.13). Имеет смысл говорить лишь об автономных автоматах такого рода, так как предположение, что и вход меняется в тактности  , нереально.
, нереально.

Рис. 5.13.
Заметим теперь, что у автономных автоматов без петель граф может содержать лишь одну устойчивую точку (равновесие), к которой стремится автомат при любом начальном состоянии. У автоматов же с петлями (т. е. при наличии в схеме обратных связей) графы могут содержать замкнутые циклы, несколько равновесий и т. д. (подробнее см. гл. VI). Хотя автоматы подобного рода иногда используются, значение их невелико, так как в таких автоматах тактность предопределена запаздыванием в реле и обычно очень быстрая.
Наиболее распространены автоматы, у которых тактность должна определяться лишь моментами изменения состояния входа, причем эти изменения происходят не часто: интервал между двумя изменениями состояний входа можно считать значительно большим, чем время срабатывания реле  . Условимся такую тактность называть медленной, а тактность, определяемую равномерным разбиением оси времени на интервалы длины
. Условимся такую тактность называть медленной, а тактность, определяемую равномерным разбиением оси времени на интервалы длины  — быстрой.
— быстрой.
Автоматы, работающие в медленной тактности, определяемой сменой состояния входа, могут быть построены из автоматов, работающих в быстрой тактности. При этом осуществляется преобразование тактности (подробнее см. гл. X). С этой целью используется возможность строить из реле быстрые автономные автоматы, графы которых имеют несколько устойчивых состояний.
Рассмотрим, например, простейшую релейную схему, показанную на рис. 5.14. Эта схема содержит два реле, обмотки которых  включены в сети, содержащие контакты этих же реле. Следовательно, схема содержит обратные связи и представляет поэтому автомат с петлями. Кроме того, в сеть включены контакты
включены в сети, содержащие контакты этих же реле. Следовательно, схема содержит обратные связи и представляет поэтому автомат с петлями. Кроме того, в сеть включены контакты  двух дополнительных реле
двух дополнительных реле  . Эти контакты служат для подачи входных воздействий.
. Эти контакты служат для подачи входных воздействий.

Рис. 5.14.
Пусть зафиксировано какое-либо положение входных контактов и далее положение их остается неизменным. Тогда, если задать начальное состояние остальных контактов, схема работает как автономный автомат в быстрой тактности в соответствии с графом этого автомата. Если этот граф не содержит замкнутых циклов и имеет несколько равновесий, то система может только стремиться к одному из них. Какое именно равновесие будет достигнуто, определяется начальным состоянием.
Пусть достигнуто состояние равновесия А. Через некоторое время после того, как оно достигнуто, меняется состояние входных контактов, и затем это новое состояние входных контактов сохраняется неизменным.
При «овом состоянии входных контактов схема образует новый автономный автомат с новым графом. Этот новый граф также может содержать несколько равновесий, но прежнее равновесное состояние А не обязательно будет равновесным на графе нового автономного автомата. В этом случае вновь происходит «переходный процесс», т. е. автомат начинает работать в быстрой тактности, стремясь к новому равновесию Б, которое определяется как графом нового автомата, так и тем, где расположено на этом графе состояние А.
Описанный процесс повторяется каждый раз, как только будет изменено состояние входных контактов. Если, в частности, через некоторое время контакты вновь будут возвращены в первоначальное состояние, система не обязательно вернется к равновесию А. Действительно, при этом вновь образуется старый автономный автомат со старыми графами, но точка Б может быть расположена на этом графе на иной ветви, чем то начальное состояние, с которого мы начали рассмотрение работы системы, и тогда будет достигнуто не равновесие А, а иное равновесие, например, В, — ведь мы предполагали, что граф автономного автомата содержит не одно, а несколько состояний равновесия.
Представим себе теперь, что мы списываем состояния входов и выходов рассматриваемой релейной системы каждый раз через а секунд после того, как произошло изменение состояния входных контактов. Величину а мы выберем достаточно большой, чтобы все «переходные процессы», происходящие в быстром темпе, успели закончиться, и состояние равновесия было достигнуто, но вместе с тем не слишком большой, чтобы за это время не изменилось состояние входа. Тогда в эти моменты времени мы будем наблюдать только равновесные состояния; появление того или иного состояния будет определяться предшествующим равновесным состоянием и состоянием входов, т. е. схема реализует конечный автомат, работающий уже не в быстрой тактности, а в тактности, определяемой сменой входных состояний.
Если выход и, может быть, вход этого автомата поступают на логический выходной преобразователь, то реализуется последовательностная машина медленной тактности.
В действительности схема работает в быстрой тактности, но это не существенно для нас, если мы интересуемся состояниями лишь в указанные выше моменты, — к этим моментам переходные процессы заканчиваются, и мы их попросту не наблюдаем.
Описанный прием построения автомата (или П-машины), работающего в быстрой тактности, для реализации на его устойчивых состояниях автомата (или П-машины), работающего в медленной тактности, определяемой изменением состояний на входе, и лежит в основе описываемого принципа построения конечных автоматов и П-машин. Так, в частности, строятся конечные автоматы и П-машины на электромеханических реле и на электронной аппаратуре (ламповых и полупроводниковых триодах и диодах).
Естественно возникает вопрос: любой ли наперед заданный конечный автомат (или П-машина), работающий в тактности, определяемой изменениями состояний входа, может быть построен с помощью указанного приема?
Положительный ответ на этот вопрос предопределен тем, что существуют регулярные методы построения схем, реализующих любой наперед заданный автомат или  машину. Один из этих методов — метод Хафмана — описан в § 5.4.
машину. Один из этих методов — метод Хафмана — описан в § 5.4.
Естественно возникает также задача о наиболее экономной сети, т. е. о сети, которая с помощью описанного приема реализует заданный автомат и имеет вместе с тем либо наименьшее число реле, контактов, внутренних состояний, либо минимизирует иные, важные для оценки схемы, параметры. Одной из задач такого рода в общей постановке посвящена гл. X.
Заметим теперь, что в оснрве описанного метода лежит создание сетей, у которых графы получаемых автономных автоматов имеют несколько равновесий. Но графы с несколькими равновесиями возможны только в автоматах с петлями. Значит, быстрый автомат должен быть обязательно автоматом с. петлей, что технически реализуется за счет обратных связей, т. е. за счет того, что обмотки реле включаются в цепи, содержащие контакты этих же реле.
В этом смысле сети реализуют медленные автоматы только за счет обратных связей. Реле, включенные в контуры обратных связей, называют иногда промежуточными реле, в отличие от реле, которые служат для управления входными контактами (входные реле) или для снятия результирующего сигнала (выходные реле).
Сравнивая агрегатный способ построения автомата и способ построения на устойчивых состояниях, мы видим, что для агрегатного построения решающим является специальный элемент, который мы назвали элементом задержки на такт, в то время как при построении на устойчивых состояниях не требуется никаких средств, кроме тех же реле, которые используются для реализации логических преобразователей, а развертывание работы во времени осуществляется за счет контуров обратных связей и специального построения контактных сетей. Но зато при описанном способе непосредственно реализуются лишь автоматы и последовательностные машины, в которых тактность определяется моментами изменения состояния входов.
Разумеется, все элементы агрегатного набора и, в частности, элемент задержки на такт сами могут быть построены на устойчивых состояниях (см. схему релейно-контактного элемента задержки, рис. 5.7), но для того, чтобы элементы, построенные по этому принципу, можно было использовать агрегатно, они должны обязательно включать выходные усилители мощности, т. е. быть активными.
Часто релейные схемы (например, сети контактов) строятся так, чтобы графы автономных автоматов, которые получаются при всех возможных состояниях входных контактов, имели специфический вид, показанный на рис. 5.15; такие графы содержат несколько равновесных состояний (на графе стрелки, выходящие из этих состояний, идут к этим же состояниям), а все остальные неравновесные состояния непосредственно соединены стрелкой с каким-нибудь из равновесных состояний. При таком построении схем каждый раз для достижения равновесия требуется только один такт, т. е. равновесие достигается за время  , и поэтому время
, и поэтому время  может быть лишь незначительно больше
может быть лишь незначительно больше  .
.
Практически это значит, что можно наблюдать состояние медленного автомата почти сразу после того, как произошло изменение входа. Разумеется, за этот один такт одновременно могут переключаться несколько реле.
Если бы время  у всех реле было строго одинаковым, факт одновременного срабатывания нескольких реле не вызывал бы осложнений. В действительности же в реальных реле время срабатывания
у всех реле было строго одинаковым, факт одновременного срабатывания нескольких реле не вызывал бы осложнений. В действительности же в реальных реле время срабатывания  не строго одинаково. Это может привести к тому, что система, работая в быстрой тактности, будет сменять состояния не в той последовательности, как это было бы при строго синхронизованных реле. Получающаяся смена состояний будет зависеть от того, какое реле срабатывает раньше, т. е. от факторов случайных и обычно не поддающихся контролю. Пример, иллюстрирующий это явление, приведен далее, в § 5.4.
не строго одинаково. Это может привести к тому, что система, работая в быстрой тактности, будет сменять состояния не в той последовательности, как это было бы при строго синхронизованных реле. Получающаяся смена состояний будет зависеть от того, какое реле срабатывает раньше, т. е. от факторов случайных и обычно не поддающихся контролю. Пример, иллюстрирующий это явление, приведен далее, в § 5.4.
Указанное явление называют обычно критическими состязаниями реле, подчеркивая этим термином то обстоятельство, что работу схемы предопределяет то реле, которое сработает быстрее. Работа схемы не должна зависеть от случайных обстоятельств, и, следовательно, критические состязания реле не должны быть допущены.
Для того чтобы избежать состязаний, схема, реализующая заданный конечный автомат или последовательностную машину, должна удовлетворять еще и некоторым дополнительным требованиям: например, переход от одного состояния к другому за время одного быстрого такта должен происходить за счет срабатывания только одного реле. Это приводит к необходимости усложнять схемы и увеличивать количество образующих их элементов (реле, контактов). Схемы, удовлетворяющие этому условию, называют реализациями.

Рис. 5.15.
Существует ряд типовых реализаций. Одна из них — предложенная Хафманом, будет описана в следующем параграфе. Разумеется, проблема состязаний отпадает в тех случаях, когда реле строго синхронизованы. Такая ситуация имеет место в некоторых магнитных усилителях, которые строятся на магнитных усилителях и вентильных элементах, так как в этих системах время  всем элементам навязано извне частотой питающего систему переменного тока.
всем элементам навязано извне частотой питающего систему переменного тока.
Оглавление
- ПРЕДИСЛОВИЕ
- ВВЕДЕНИЕ
- ГЛАВА 1. ЭЛЕМЕНТЫ МАТЕМАТИЧЕСКОЙ ЛОГИКИ
- § 1.2. Основные понятия
- § 1.3. Исчисление высказываний
- б) Функции одной и двух переменных
- в) Функции n переменных. Конъюнктивные и дизъюнктивные нормальные формы
- г) Функции n переменных. Алгебра исчисления высказываний
- § 1.4. Об исчислении предикатов (двузначных)
- ГЛАВА II. ТЕХНИЧЕСКИЕ ПРИЛОЖЕНИЯ ИСЧИСЛЕНИЯ ВЫСКАЗЫВАНИЙ
- § 2.1. Однотактные релейно-контактные схемы
- § 2.2. Анализ однотактных релейно-контактных схем
- § 2.3. Синтез однотактных релейно-контактных схем
- § 2.4. Иные методы технической реализации логических функций
- б) Схемы на триодах
- в) Схемы на магнитных элементах
- д) Схемы на пневмореле
- § 2.5. Проблема минимизации устройств, реализующих логические функции
- ГЛАВА III. ОБЩИЕ ПОНЯТИЯ О КОНЕЧНЫХ АВТОМАТАХ И ПОСЛЕДОВАТЕЛЬНОСТНЫХ МАШИНАХ
- § 3.1. Дискретное время и такты
- § 3.2. О динамических системах
- § 3.3. Конечные автоматы
- § 3.4. Последовательностные машины
- § 3.5. Методы задания конечного автомата и последовательностной машины
- § 3.6. Методы записи работы автомата
- § 3.7. Замечание об ограничении входных последовательностей
- ГЛАВА IV. АБСТРАКТНАЯ СТРУКТУРА И СЕТЬ
- § 4.1. Общие понятия о замещении последовательностных машин
- § 4.2. Абстрактная структура автомата
- § 4.3. Сеть
- § 4.4. Абстрактная агрегатизация автоматов и последовательностных машин
- § 4.5. Абстрактный нейрон и абстрактные модели нейронных сетей
- ГЛАВА V. ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ КОНЕЧНЫХ АВТОМАТОВ И ПОСЛЕДОВАТЕЛЬНОСТНЫХ МАШИН
- § 5.1. Два метода технической реализации конечных автоматов и последовательностных машин
- § 5.2. Агрегатное построение конечных автоматов и последовательностных машин
- § 5.3. Построение конечных автоматов и последовательностных машин с использованием естественных задержек и обратных связей
- § 5.4. Метод и реализация Хафмана
- а) Замечания о типе автомата или последовательностной машины
- б) Построение таблицы переходов по заданной таблице последовательностной машины
- в) Сокращение (сжатие) таблицы переходов
- г) Составление таблицы релейной схемы
- д) Реализация схемы по Хафману
- ГЛАВА VI. АВТОНОМНЫЙ КОНЕЧНЫЙ АВТОМАТ И АВТОНОМНАЯ ПОСЛЕДОВАТЕЛЬНОСТНАЯ МАШИНА
- § 6.1. Что «могуть делать» автономный конечный автомат и автономная последовательностная машина
- § 6.2. Синтез двоичной структуры автономной последовательностной машины
- ГЛАВА VII. ПРЕДСТАВЛЕНИЕ СОБЫТИЙ В КОНЕЧНОМ АВТОМАТЕ И ПОСЛЕДОВАТЕЛЬНОСТНОЙ МАШИНЕ
- § 7.2. Событие. Представление событий
- § 7.3. Действия над множествами входных последовательностей. Регулярные события
- § 7.4. Представимость регулярных событий
- § 7.5. Регулярность представимых событий
- § 7.6. Существуют ли нерегулярные (непредставимые) события?
- § 7.7. Что «может делать» конечный автомат
- ГЛАВА VIII. РАСПОЗНАВАНИЕ РЕАЛИЗУЕМОСТИ ЗАДАНИЯ И АБСТРАКТНЫЙ СИНТЕЗ КОНЕЧНЫХ АВТОМАТОВ И ПОСЛЕДОВАТЕЛЬНОСТНЫХ МАШИН
- § 8.2. Случай, когда задание перечисляет требуемые соответствия между входными и выходными последовательностями
- § 8.3. Алгоритмическая неразрешимость проблемы распознавания представимости рекурсивных событий
- § 8.4. Синтез конечных автоматов и последовательностных машин при задании, сформулированном на языке регулярных выражений
- ГЛАВА IX. ЭКВИВАЛЕНТНОСТЬ И МИНИМИЗАЦИЯ ПОСЛЕДОВАТЕЛЬНОСТНЫХ МАШИН
- § 9.2. Алгоритмическая неразрешимость проблемы распознавания эквивалентных состояний в общем случае
- § 9.3. Распознавание эквивалентности состояний в случае, когда множество входных последовательностей не ограничено
- § 9.4. Распознавание эквивалентности состояний в случае, когда ограничения наложены на длину входных последовательностей
- § 9.5. Понятия об эквивалентности, отображении и минимизации последовательностных машин
- § 9.6. Минимизация последовательностной машины в случае, когда множество входных последовательностей не ограничено
- § 9.7. Минимизация последовательностной машины в случае, когда она работает как конечный автомат
- 1. Множество L допустимых входных последовательностей содержит все возможные последовательности, т. е. L=E
- 2. Множество L не содержит последовательностей, имеющих два одинаковых символа подряд
- § 9.8. Минимизация последовательностных машин в случае ограничений типа Ауфенкампа
- § 9.9. Об ином определении эквивалентности последовательностных машин
- ГЛАВА Х. ПРЕОБРАЗОВАНИЕ ТАКТНОСТИ ПОСЛЕДОВАТЕЛЬНОСТНЫХ МАШИН
- § 10.1. Общие соображения о преобразовании тактности. Определение понятий изображения и воспроизведения
- § 10.2. Примеры изображения и воспроизведения
- б. Линия задержки
- § 10.3. Воспроизведение медленной последовательностной машины быстрой машиной в случае, когда тактность медленной машины определяется сменой состояний на входе
- § 10.4. Минимизация воспроизводящей последовательностной машины, построенной в предыдущем параграфе
- ГЛАВА XI. ОПРЕДЕЛЕНИЕ СВОЙСТВ ПОСЛЕДОВАТЕЛЬНОСТНЫХ МАШИН ПО ИХ РЕАКЦИИ НА ВХОДНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ КОНЕЧНОЙ ДЛИНЫ
- § 11.2. Определение эквивалентности состояний последовательностных машин по реакции машины на входные последовательности конечной длины
- § 11.3. Изучение последовательностных машин с помощью кратных экспериментов
- § 11.4. Изучение последовательностных машин с помощью простых экспериментов
- ГЛАВА XII. АЛГОРИТМЫ
- § 12.1. Примеры алгоритмов
- § 12.2. Общие свойства алгоритмов
- § 12.3. Проблема слов в ассоциативном исчислении
- § 12.4. Алгоритм в некотором алфавите А. Нормальный алгоритм Маркова
- § 12.5. Сведение любого алгоритма к численному алгоритму. Гёделизация
- § 12.6. Элементарные и примитивно-рекурсивные функции
- § 12.7. Предикаты. Ограниченный оператор наименьшего числа
- § 12.8. Пример построения вычислимой, но не примитивно-рекурсивной функции
- § 12.9. Общерекурсивные функции. Определение Эрбрана — Гёделя
- § 12.10. Явная форма общерекурсивных функций
- § 12.11. Тезис Чёрча
- § 12.12. Рекурсивные действительные числа
- § 12.13. Рекурсивно-перечислимые и рекурсивные множества
- ГЛАВА XIII. МАШИНЫ ТЬЮРИНГА
- § 13.1. Описание и примеры машин Тьюринга
- § 13.2. Композиция машин Тьюринга
- § 13.3. Вычисления на машинах Тьюринга
- ЗАКЛЮЧЕНИЕ
- § 2. Последовательность синтеза технического устройства, реализующего конечный автомат или последовательностную машину
- БИБЛИОГРАФИЯ
Время-токовая характеристика автоматического выключателя (ВТХ) (time-current characteristic circuit-breaker) — кривая, задающая время расцепления автоматического выключателя в зависимости от величины сверхтока, протекающего в его главной цепи (определение на основе [1]).
Харечко Ю.В. проведя достаточный анализ существующей нормативной документации заключил следующее [1]:
« В МЭС и стандартах МЭК приведено общее определение рассматриваемого термина и для автоматического выключателя, и для плавкого предохранителя. При этом в определении использован термин «время срабатывания» («operating time»), который не имеет своего определения. Для автоматического выключателя целесообразно дать более конкретное определение термина «время-токовая характеристика», в котором вместо неопределенного понятия «время срабатывания» целесообразно использовать понятие «время расцепления1», которое определено в МЭС и некоторых стандартах МЭК. »
[1]
Примечание 1: В МЭС (в стандарте ГОСТ IEC 60050-442-2015 [3]) термин «время расцепления» определен так: интервал времени от момента, когда соответствующий ток расцепления начинает протекать в главной цепи до момента, когда протекание этого тока прерывается (во всех полюсах). В примечании к определению термина «время размыкания» («opening time»), приведенному в стандарте МЭК 60898‑1, сказано, что время размыкания обычно упоминается как время расцепления, хотя, строго говоря, время расцепления применяется ко времени между моментом инициирования времени размыкания и моментом, в который команда размыкания становится необратимой.
Харечко Ю.В. дополняет [1]:
« Следует также учитывать, что в стандарте МЭК 60898‑1 (ГОСТ IEC 60898-1-2020) при установлении параметров время-токовой характеристики автоматического выключателя использовано понятие «время расцепления», зависящее от величины сверхтока, протекающего в главной цепи автоматического выключателя. »
« Время-токовая характеристика автоматического выключателя устанавливает время расцепления в зависимости от значения сверхтока, который протекает в его главной цепи. Время-токовая характеристика каждого автоматического выключателя, с одной стороны, должна предопределять осуществление им надежной защиты проводников электрических цепей от сверхтока. »
Время отключения сверхтока зависит от индивидуальной время-токовой характеристики автоматического выключателя, которая должна находиться в пределах стандартной время-токовой зоны.
Харечко Ю.В. акцентирует внимание [1]:
« Автоматический выключатель должен своевременно отключать электрические цепи с целью недопущения перегрева их проводников. С другой стороны, она не должна допускать расцепления автоматического выключателя при протекании в его главной цепи электрического тока, равного номинальному току, если температура окружающего воздуха не превышает контрольную температуру окружающего воздуха, равную 30 °С. Кроме того, параметры время-токовой характеристики автоматического выключателя должны быть такими, чтобы можно было избежать отключения им пусковых токов, протекающих в электрической цепи при включении электрооборудования. »
[1]
Время-токовая характеристика автоматического выключателя бытового назначения, соответствующего требованиям стандартов МЭК 60898‑1 или МЭК 60898‑2, ГОСТ IEC 60898-1-2020 или ГОСТ IEC 60898-2-2011, состоит из двух кривых, определяющих разный характер оперирования автоматического выключателя (см. рисунок 1). В области малых сверхтоков, обычно представляющих собой токи перегрузки и пусковые токи, время расцепления автоматического выключателя измеряется секундами, минутами и даже десятками минут.
Оно обратно пропорционально значению сверхтока в главной цепи автоматического выключателя. В области больших сверхтоков, которые, как правило, являются токами короткого замыкания, время расцепления автоматического выключателя измеряется долями секунды. Причем оно незначительно уменьшается при увеличении сверхтока. Граница между двумя кривыми «проходит» по индивидуальному току мгновенного расцепления IIT автоматического выключателя.

Что влияет на ВТХ?
Время-токовая характеристика должна быть стабильной во время эксплуатации автоматического выключателя и находиться в пределах стандартной время-токовой зоны.
Харечко Ю.В. в своей книге [1] дополняет, какие условия могут влиять на ВТХ автоматического выключателя:
« Изменение температуры окружающего воздуха сказывается на характеристике расцепления автоматического выключателя. Однако, как отмечается в стандарте МЭК 60898‑1 и ГОСТ IEC 60898-1-2020 [4], изменение температуры окружающего воздуха от – 5 до + 40 оС не должно сопровождаться существенным ее изменением. При температуре окружающего воздуха – 5 оС автоматический выключатель (через все полюсы которого в течение условного времени пропускали электрический ток, равный 1,13 его номинального тока In), должен отключить в течение условного времени электрический ток, равный 1,9 In. При температуре окружающего воздуха + 40 оС автоматический выключатель, через все полюсы которого протекает электрический ток, равный его номинальному току, должен расцепиться в течение условного времени. »
« На время-токовую характеристику автоматического выключателя также могут влиять условия монтажа. Например, размещение нескольких автоматических выключателей в одной оболочке приводит к незначительному изменению их характеристик расцепления, обусловленному тем, что температура воздуха внутри оболочки обычно превышает температуру воздуха вне оболочки. »
« На время-токовую характеристику многополюсного автоматического выключателя оказывает влияние протекание электрического тока только через один полюс. Стандартом МЭК 60898‑1 и ГОСТ IEC 60898-1-2020 установлены пределы указанного изменения. Двухполюсный автоматический выключатель с двумя защищенными полюсами должен расцепиться в пределах условного времени при протекании через один его полюс электрического тока, равного 1,1 условного тока расцепления (начиная от холодного состояния). Трехполюсный и четырехполюсный автоматические выключатели должны расцепиться в течение условного времени при протекании через один защищенный полюс электрического тока, равного 1,2 условного тока расцепления. »
Список использованной литературы
- Харечко Ю.В. Краткий терминологический словарь по низковольтным электроустановкам. Часть 5// Приложение к журналу «Библиотека инженера по охране труда». – 2017. – № 2. – 160 c
- ГОСТ IEC 60050-441-2015
- ГОСТ IEC 60050-442-2015
- ГОСТ IEC 60898-1-2020