Посмотрим на тенденции развития современной промышленной робототехники. Во-первых, это тяжелые узкоспециализированные роботы, работающие в составе технологических линий, задача которых «бери больше — кидай дальше». Во-вторых, роботы-транспортировщики, умеющие двигаться либо по меткам, либо по программе до места назначения с использованием искусственного интеллекта. И, наконец, третья тенденция — коллаборативные роботы-помощники, работающие в общей среде с человеком, для чего им нужна подвижность манипуляторов, совмещенная с последними достижениями в области искусственного интеллекта.
Что касается манипуляторов, то в случае коллаборативного использования робота необходимо решить одну весьма сложную проблему. Дело в том, что манипуляторы, использующиеся на производстве, как правило, предназначены для перемещения тяжелых объектов, они выполнены из стали и работают на базе мощных пневматических систем, делающих их сильными и быстрыми, но совсем не деликатными. Контакт манипулятора такого робота с человеком в момент работы чаще всего влечет плачевные последствия для последнего, а о какой-либо коллаборации вопрос не стоит в принципе. Если перефразировать известное выражение: «люди — отдельно, а роботы — отдельно», и желательно подальше друг от друга.
Для коллаборативной робототехники необходимо мягкое, чувствительное (имеется в виду обладание соответствующей тактильной чувствительностью) и, естественно, высокоинтеллектуальное решение. Основное внимание здесь уделяется пневматическим легким роботам, которые по своей природе предназначены для совместной работы и могут в будущем представлять экономически эффективную альтернативу классическим концепциям роботов. Сильными сторонами пневматических приводов всегда были простое обращение и высокая надежность наряду с низкой стоимостью приобретения и достаточно высокой мощностью, которая позволяет им применять сравнительно большую силу по отношению к собственному низкому весу. Что касается экономии, то процессы удержания обходятся в таких системах без дальнейшего потребления сжатого воздуха и, следовательно, чрезвычайно энергоэффективны.
Компания Festo, известная приверженностью к бионике и достигшая в этом направлении немалых успехов [1], сделала очередной шаг в области коллаборативной робототехники. Ее команда во главе с инициатором проекта доктором Вильфридом Штоллем (Wilfried Stoll) и автором идеи и концепции профессором Дитером Манкау (Dieter Mankau) из университета Франкфурт-на-Майне представила мягкую бионическую руку — BionicSoftHand (рис. 1) [2]. Эта пневматическая роботизированная рука будет впервые показана на выставке Hannover Messe 2019. Объединенное с бионическим плечом BionicSoftArm [5] в легкий пневматический робот, данное решение оптимально подходит для совместной работы человека и робота. BionicSoftHand может безопасно использоваться и при непосредственном контакте с человеком, поскольку в своей основе является пневматическим [3].

Рис. 1. Бионическая мягкая рука BionicSoftHand компании Festo
Будь то захват, удержание, поворот, прикосновение, печатание или нажатие — в повседневной жизни мы используем наши руки для самых разнообразных задач как нечто само собой разумеющееся. В этом отношении человеческая рука, с ее уникальным сочетанием силы, ловкости (говоря техническим языком — степени свободы) и прекрасной моторной сенсорики, является настоящим чудодейственным «продуктом» природы. Что может быть более естественным, чем оснащение коллаборативных роботов захватом, смоделированным по природному образцу, который решает различные задачи путем обучения через искусственный интеллект?
Что же представляет собой BionicSoftHand компании Festo? В отличие от человеческой руки, BionicSoftHand не имеет скелетной структуры. Его «пальцы» состоят из гибких сильфонных структур с воздушными камерами, вокруг которых располагается созданная с помощью 3D-печати трехмерная ткань из эластичных волокон, которая изгибается вместе с движениями руки, когда в сильфоны подается воздух. Проще говоря, все это больше похоже на работу наших мышц и сухожилий. Это делает BionicSoftHand легким, гибким, адаптируемым и чувствительным, но при этом способным оказывать достаточное силовое воздействие (рис. 2) [2]. Кроме того, такая гибкая пневматическая конструкция BionicSoftHand отличается от рук робота с электрическим или кабельным управлением возможностью более дешевого изготовления. При этом рабочее давление в пальцах составляет всего 3,5 бар, а в поворотных модулях — 6 бар. Максимальная грузоподъемность, в зависимости от ориентации, достигает 4 кг.

Рис. 2. Компоненты высокоинтегрированного мягкого манипулятора BionicSoftHand
Как мы видим из рис. 2, мягкие пальцы роботизированной руки BionicSoftHand (размеры пальцев манипулятора: 4×98 мм (основные пальцы); 1×79 мм (маленький палец)) оснащены инерционными датчиками движения и силы, которые способны контролировать момент движения и усилие. Сенсоры обеспечивают обратную связь с системами управления рукой, сообщая о совершаемых движениях самой руки и пальцев, а также о контакте с объектом. Кроме того, они передают информацию о том, правильно ли расположен объект в руке для дальнейшей манипуляции. Другими словами, комплекс датчиков наделяет руку контактным восприятием, имитирующим наше чувство осязания. В целом в кисти использованы:
- 1 инерционный датчик на тыльной стороне кисти;
- 10 инерционных датчиков в захватных пальцах;
- 15 датчиков тактильного усилия в пальцах;
- 14 датчиков давления воздушного потока.
Управление движениями манипулятора BionicSoftHand, как уже было сказано, осуществляется с помощью пневматической структуры, встроенной в его пальцах. Когда камеры наполнены воздухом, пальцы сгибаются. Если воздух из камеры удален (выпущен через обратный клапан), то пальцы выпрямляются. Большой и указательный пальцы дополнительно оснащены поворотным модулем, который позволяет им перемещаться в боковом направлении. Такое построение обеспечивает бионической руке двенадцать степеней свободы. Для сравнения, например, наш основной рабочий орган — кисть руки — по отношению к туловищу имеет семь степеней свободы: по две оси у лучезапястного и локтевого и три оси у плечевого сустава. Таким образом, BionicSoftHand можно считать абсолютно свободным телом, поскольку, согласно теории механики, для этого достаточно шести степеней свободы.
Одной из важных особенностей рассматриваемой системы является то, что для того чтобы удерживать давление в пневмоприводе BionicSoftHand на как можно более низком уровне, разработчики создали специальный небольшой пневмоостров с цифровым управлением, который монтируется непосредственно на бионической руке. Такое решение обеспечивает управление пальцами манипулятора без необходимости передачи воздуха через всю руку робота. BionicSoftHand можно быстро и легко подключить к общей пневмосистеме, и это также позволяет использовать только одну трубку для подачи и вытяжки воздуха.
С помощью пропорциональных пьезоклапанов движения пальцев можно точно контролировать. Что же касается оболочки, то для прикрытия сильфонных структур используется материал EPDM (этилен-пропилен-диен-каучук) с твердостью по Шору ~45, а для остальной части руки была разработана новая технология — специальная трехмерная трикотажная ткань сложного переплетения на основе волокна Dyneema производства компании Dutch State Mines (Нидерланды) из высокомолекулярного полиэтилена (HPPE). Это сверхпрочное полиэтиленовое волокно изготавливается с помощью уникального процесса, в результате которого молекулы приобретают новую параллельную ориентацию, что, собственно, и придает волокну уникальные механические свойства.
Решение на основе манипулятора BionicSoftHand оснащено самообучающимся модулем искусственного интеллекта, способным самостоятельно просчитывать оптимальный способ взаимодействия руки с разными предметами и совершения разных действий, причем в кратчайшие сроки. Манипулятор получает данные не только от встроенных тактильных сенсоров и датчиков давления, но и от 3D-камер с восприятием перспективы, что необходимо для анализа предметов и движений в зоне действия такого робота. Методы машинного обучения сравнимы с человеческими: они требуют обратной связи, будь она позитивная или негативная, следуя этим действиям, чтобы их классифицировать и запоминать. BionicSoftHand использует метод обучения на основе подкрепления приобретенных навыков. Это означает, что вместо слепого подражания определенному действию бионической руке BionicSoftHand просто ставят цель, а она для ее достижения использует метод проб и ошибок.
Все это весьма похоже на наше обучение: неврологи говорят, что люди настолько умны, потому что руки могут решать очень много сложных задач. Младенцы начинают использовать их очень рано — например, «узнавать» мамины пальцы и игрушки. Как только они научатся правильно захватывать объект, они могут вращать его и смотреть на него со всех сторон. Это единственный способ восстановить трехмерное изображение объекта в голове. Таким образом, рука также помогает людям учиться. Автор статьи как-то наблюдал за тем, как его двухмесячный сын осваивал соску — он брал ее рукой, оценивал и пытался использовать по назначению, через час проб и ошибок цель была достигнута. Аналогично действует и BionicSoftHand. Перед началом манипуляции объектом система искусственного интеллекта самостоятельно перебирает все возможные комбинации того, как правильно взять объект, как его повернуть и положить на заданное место. Для этого используется комплексная виртуальная симуляция, в которой методом проб и ошибок подбирается правильный вариант дальнейшего действия. Все это реализуется не хаотично, а на основе полученных откликов от встроенных датчиков и системы машинного зрения, BionicSoftHand постепенно оптимизирует свои действия до тех пор, пока задача не будет успешно решена. Неизвестно, сколько вариантов использования соски было симулировано и как проводил вычисления мозг ребенка, но BionicSoftHand выполняет то же самое в виртуальной среде, перебирая (что важно, параллельно) миллиарды ошибочных вариантов и в итоге определяя наиболее правильный и оптимальный, не за часы, а за доли секунды.
В частности, в примере из видеовыше BionicSoftHand должен вращать 12-сторонний многогранник (рис. 3) так, чтобы в конце всех манипуляций он был повернут заданной стороной вверх, причем как именно это сделать, машине не объяснили и на примерах не обучили. Сначала робот, с помощью 3D-камеры с восприятием перспективы, создает цифровую копию объекта, а затем производит параллельное моделирование с множеством виртуальных рук, которые манипулируют объектом до тех пор, пока не будет подобрана правильная комбинация действий. И только после этого алгоритм передается BionicSoftHand. При таком методе машина способна обучаться гораздо быстрее, чем посредством перебора манипуляций физическим объектом. В будущем, при выполнении новых близких по смыслу задач, робот может задействовать уже выученные ранее алгоритмы манипуляций.

Рис. 3. Иллюстрации алгоритма принятия решения системой с использованием манипулятора BionicSoftHand
Развитие данной технологии не ограничилось возможностями кисти и пальцев. Бионическая рука BionicSoftHand, как уже было сказано в самом начале статьи, совмещается с BionicSoftArm — гибким плечом (рис. 4) [5, видео в конце статьи].

Рис. 4. Бионическое гибкое плечо BionicSoftArm
BionicSoftArm — это компактная доработка уже известного читателям BionicMotionRobot [1], спектр приложений которой в настоящее время значительно расширен. Это стало возможным благодаря модульной конструкции BionicSoftArm, объединяющей несколько сегментов пневматического сильфона (в данном случае они выполнены из натурального каучука) и поворотных приводов. Такое решение позволяет роботу освоить как свободные и гибкие движения, так и их определенные последовательности [видео сверху], а также полностью соответствовать всем требованиям для безопасной работы с людьми. В зависимости от данных требований длина бионического плеча BionicSoftArm может варьироваться до семи пневматических приводов, что обеспечивает максимальную гибкость в рабочем диапазоне и необходимую мобильность. Такой подход упрощает разработку и внедрение приложений, которые трудно осуществить с помощью стандартного робота, и позволяет BionicSoftArm обходить препятствия даже в самых узких местах. Прямое взаимодействие человека с роботом также возможно, как и использование в классических приложениях SCARA (Selective Compliance Articulated Robot Arm — кинематика, основанная на рычажной системе, которая обеспечивает перемещение конечного звена в плоскости за счет вращательного привода рычагов механизма) — например, в задачах выбора и размещения. Применять BionicSoftArm помогает интерфейс для подключения различных захватов (рис. 5).
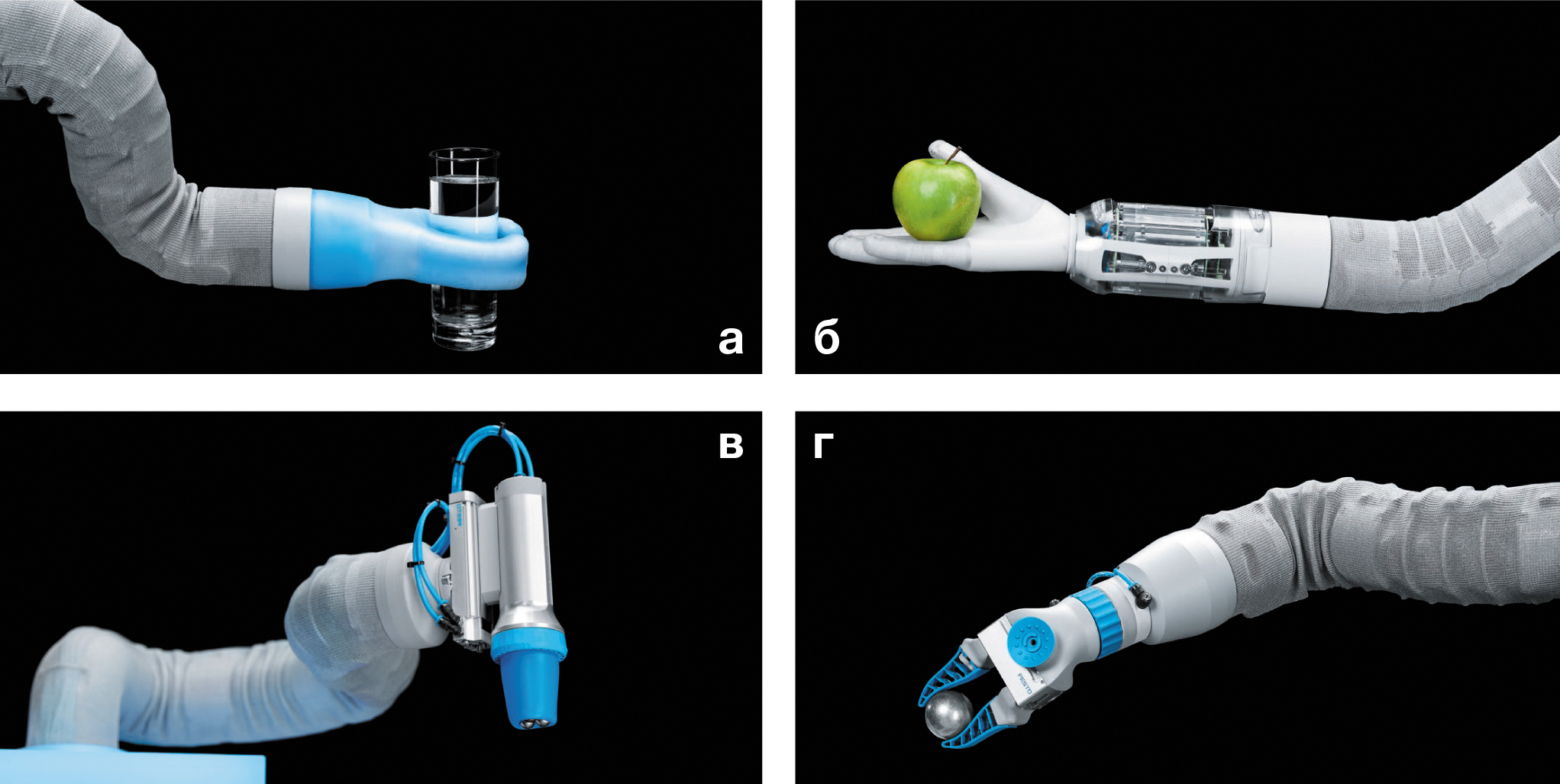
Рис. 5. Возможные варианты оснащения BionicSoftArm, реализуемые благодаря интерфейсу для подключения различных захватов: а) три или четыре пальца захвата; б) бионическая рука Bionic SoftHand; в) адаптивный захват формы DHEF; г) адаптивный захват DHAS
Одним из таких захватов является подробно рассмотренная выше бионическая рука BionicSoftHand (рис. 5б). Благодаря модульной конструкции есть также варианты захвата с тремя или четырьмя пальцами (рис. 5а). В настоящее время эти захваты еще являются бионическими концепциями, которые могут быть использованы в производстве в будущем. В качестве захватов могут быть также применены адаптивный по форме захват DHEF (рис. 5в) и параллельный захват с адаптивными губками DHAS (рис. 5г). Оба этих захвата были сначала разработаны как прототипы в рамках учебной программы Bionic Learning Network, которой компания Festo уделяет большое внимание, а уже затем развились в серию продуктов.
Адаптивный захват DHEF, предлагаемый компанией Festo, действует как язык хамелеона: он способен без необходимости в ручном управлении собирать, комплектовать, складывать в соответствующие емкости предметы самых разнообразных форм. Силиконовая насадка адаптивного захвата DHEF способна изгибаться и фиксировать предметы фактически любой формы [видео сверху], что позволяет точно адаптировать захват в соответствии с теми или иными потребностями. В отличие от механических захватов, способных работать лишь с ограниченным числом предметов, адаптивный захват DHEF весьма гибок. Он управляется даже с деталями свободной геометрической формы, а отсутствие острых краев делает DHEF оптимальным для захвата объектов, требующих особо бережного обращения.
DHAS поставляются как стандартные губки для захватов с удлиненным ходом или с индивидуальным креплением для захватных систем по условиям конкретного заказчика. Захват DHAS выполнен из мягкого материала — полиуретана, что отлично подходит для бережного захвата хрупких заготовок, при этом пальцы могут захватывать детали разной формы. В поперечном сечении ребра и кромки захвата образуют решетчатую структуру по принципу Fin Ray. Такие соединения, когда к ним приложено усилие, создают волнообразную форму, которая оптимально подходит для геометрического замыкания.
Для реализации прямого контакта между человеком и машиной пневматические роботы предлагают еще одно решающее преимущество — присущую им гибкость. Если привод заполнен сжатым воздухом, то создаваемое движение может быть точно задано с точки зрения скорости, силы и жесткости. В случае столкновения система автоматически отключается и, таким образом, не представляет опасности для людей.
Модульный манипулятор робота может применяться для самых разных применений, в зависимости от конструкции и установленного захвата. В структуре BionicSoftArm используются датчики AA700 FREEPITCH компании Sensitec, выполненные на основе анизотропного магнитосопротивления (АМР), энкодер EBI 1135 производства компании Heidenhain и датчики давления XFGM компании Fujikura. Благодаря своей гибкой кинематике и встроенным сенсорам BionicSoftArm может непосредственно и безопасно взаимодействовать с людьми. В то же время кинематика облегчает адаптацию к различным задачам в разных местах в производственных условиях: устранение дорогостоящих защитных устройств, таких как защитные и световые барьеры, сокращает время преобразования производства и, таким образом, обеспечивает гибкое использование роботов, в полном соответствии с современными требованиями адаптивного и экономичного производства.
Бионическое плечо BionicSoftArm управляется интуитивно, с помощью роботизированного программного обеспечения. Графический интерфейс пользователя был разработан специально для бионических легких роботов Festo и впервые использовался в BionicCobot [1]. С помощью планшета пользователь может довольно легко обучить робота каким-либо действиям и установить их параметры. Определенные этапы работы могут быть организованы в срок в любом порядке по системе «перенести и положить». При этом полная последовательность движений виртуально изображается и моделируется одновременно.
Точное позиционирование достигается благодаря цифровой пневматике, что стало возможным благодаря Festo Motion Terminal VTEM. Благодаря внутренним алгоритмам управления приложениями движения и установленными пьезоклапанами можно точно дозировать скорости потока и давления, а также изменять их при любой настройке одновременно в нескольких каналах. Движения BionicSoftArm контролируются положением, что достигается с помощью модельного подхода. Каждая часть робота является моделью, а требуемые параметры либо рассчитываются, либо определяются с использованием идентификации параметров. Необходимые алгоритмы управления выполняются в режиме реального времени на Festo Motion Terminal. Состояние BionicSoftArm постоянно контролируется с помощью датчиков давления и абсолютного положения по всему роботу с помощью Festo Motion Terminal.
Интерфейсом между планшетом и Festo Motion Terminal является платформа с открытым исходным кодом ROS (Robot Operating System), на которой рассчитывается планирование пути кинематики. Кроме того, ROS интерпретирует входящий код с планшета и передает полученные координаты оси в терминал движения. На основе этих координат и данных, поступающих с датчика, Festo Motion Terminal может контролировать соответствующее давление в пневматических приводах и, таким образом, определять положения отдельных сегментов и осей.
Также возможны дистанционные манипуляции с системой BionicSoftHand и BionicSoftArm. С помощью изображений с камеры, чувствительной к перспективе, рука робота может имитировать жесты и движения руки оператора и реагировать на них. Таким образом, роботом можно управлять и контролировать его движения с безопасного расстояния, например при работе с вредными веществами или при выполнении операций, которые могут привести к травмам. Кроме того, это открывает возможности для управления несколькими системами одновременно.
В будущем на производстве возникнет необходимость в более гибких установках и компонентах, которые независимо подстраиваются под соответствующий производимый продукт. Адаптируемые захваты, такие как BionicSoftHand, могут сыграть при этом немаловажную роль. Кроме того, возможность разрабатывать независимые стратегии решений сделает взаимодействие между человеком и машиной еще более интуитивным, простым и эффективным. Преимущества таких интеллектуальных систем заключаются еще и в том, что как только они получат блоки знаний и новые навыки, их можно легко распространять и предоставлять в глобальном масштабе.
- /
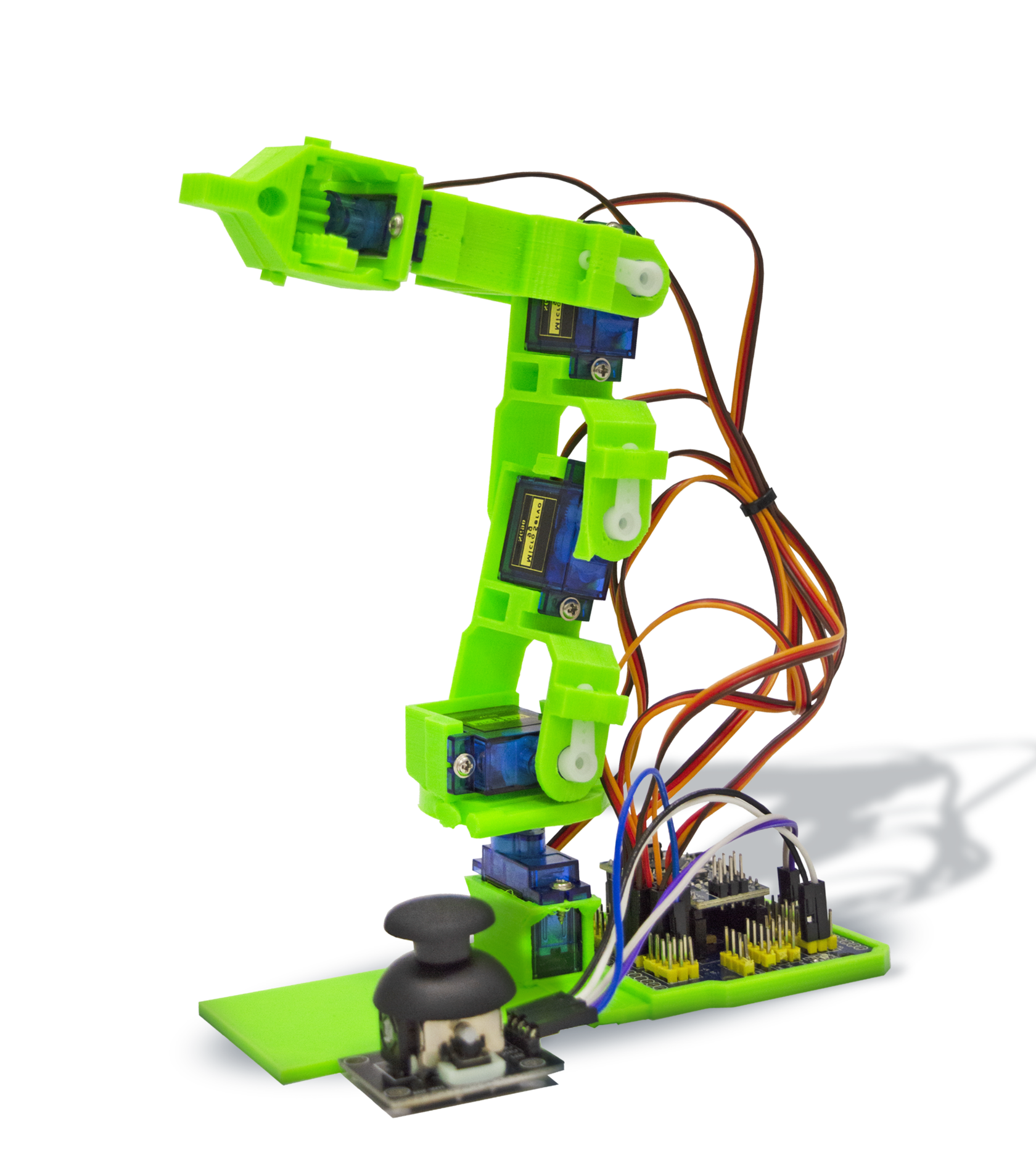
Обучающий конструктор Робот-манипулятор
Развивающий набор и увлекательные уроки – отличный подарок ребёнку
Развивающий набор
и увлекательные уроки – отличный подарок ребёнку

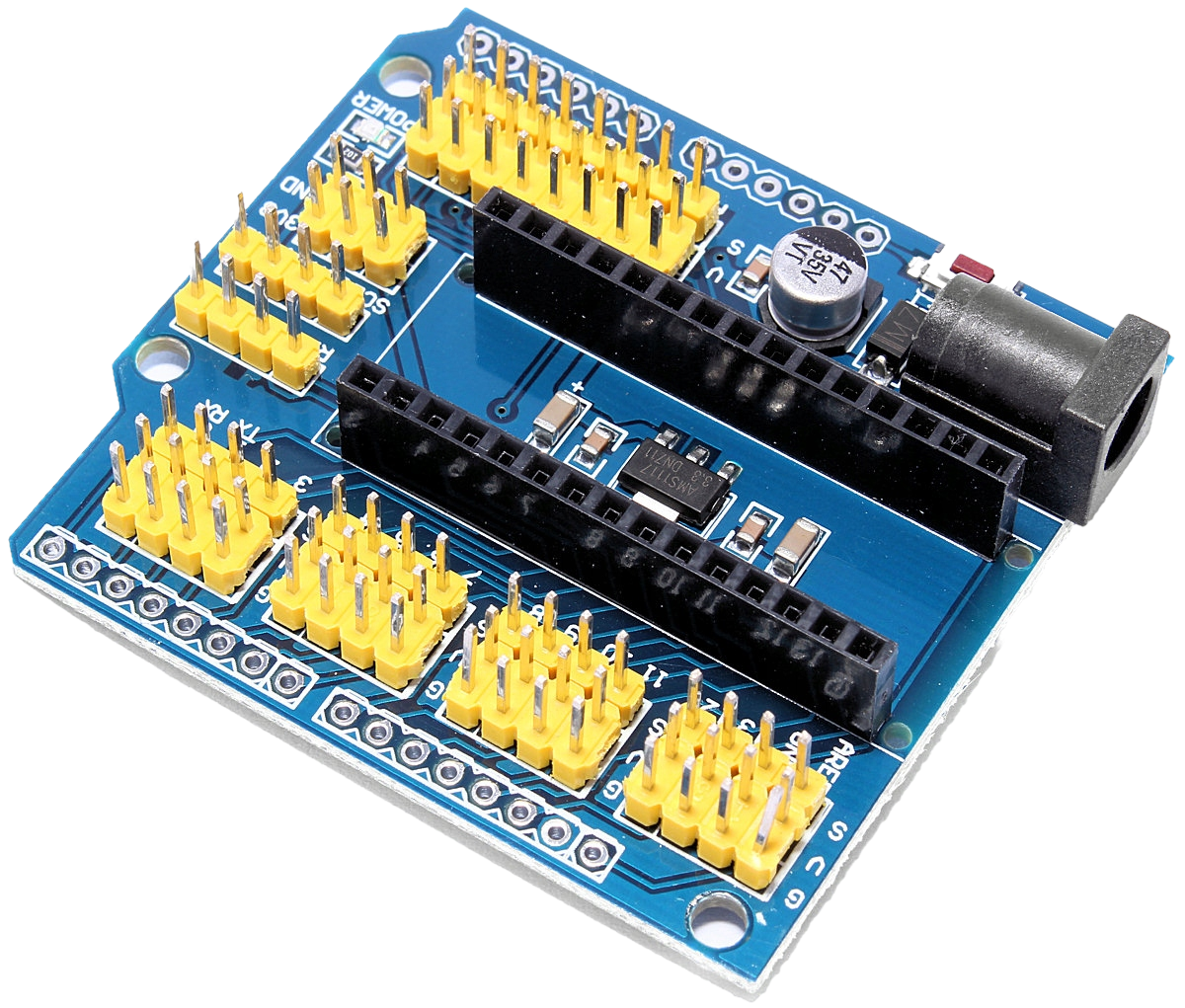
Плата Arduino Nano I/O Shield
Плата Arduino
Nano I/O Shield
Узнайте всё самое главное
о наборе за 5 минут
Узнайте всё самое главное о наборе
за 5 минут

Вы получаете набор для сборки робота и доступ
к личному кабинету
с видеоуроками
и инструкциями
Проходите курс по работе с несложными электронными схемами Arduino
Собираете робота-манипулятора и учите его разнообразным командам
Чему научим нашего робота?

Двигаться с управления джойстиком
Дополнительно в набор входит подарок для углубленной работы с датчиками и модулями робота:




Полный доступ к инструкциям и онлайн-урокам по программированию и сборке
Плата Arduino Nano I/O Shield

Креативность
и техническое творчество
Самостоятельность
и работа на результат
Применение законов физики на практике
Понимание принципов работы электронных схем
Закажите Манипулятор прямо сейчас

Погрузитесь в мир Arduino и блочного программирования mBlock 5 вместе с нами
Чтобы вы могли познакомиться с Доботом поближе, наши специалисты подготовили для вас специальный видеобзор:
Образовательная комплектация
- Робот-манипулятор образовательный;
- Захват механический с пневматическим приводом;
- Захват вакуумный;
- Захват для пишущего инструмента;
- Экструдер для 3D-печати;
- Лазерный модуль гравировки;
- Пульт управления;
- Bluetooth-модуль;
- Wi-Fi-модуль;
- Комплект методических материалов и заданий.
Насадки
3D Printer Kit
- Максимальный размер печати (Д × Ш × В) 150 мм × 150 мм × 150 мм (МАКС)
- Материал PLA
- Разрешение 0.1 мм
Лазер
- Потребляемая мощность 500 мВт
- Тип 405 нм (синий лазер)
- Сила 12В, триггер TTL (с драйвером PWM)
Держатель ручки
- Диаметр ручки 10 мм
Вакуумная присоска
- Диаметр крышки 20 мм
- Давление -35 Kpa
Захват
- Диапазон 27.5 мм
- Тип привода Пневматический
- Force 8N
Смена насадок позволяет Доботу:
печатать 3D объекты

писать и рисовать
выполнять лазерную гравировку на коже и бумаге

Характеристики

- Количество осей 4
- Полезная нагрузка 500г
- Максимум. рычаг 320 мм
- Повторяемость позиции (контроль) 0,2 мм
- Связь USB / WIFI / Bluetooch
- Источник питания 100 В — 240 В, 50/60 Гц
- Мощность 12 В / 7 А DC
- Потребление 60 Вт Макс.
- Рабочая температура -10 ° C — 60 ° C
Физические параметры

- Вес нетто — 3,4 кг
- Вес брутто (стандартная версия) — 7.2 кг
- Вес брутто (версия для образования) — 8.0 кг
- Базовый размер (след) — 158 мм × 158 мм
- Материалы — Алюминиевый сплав 6061, ABS Engineering Plastic
- Контроллер — Интегрированный контроллер Dobot
- Робот-монтаж — рабочий стол
- Размер упаковки (Д × Ш × В) — 307 мм × 224 мм × 330 мм
- Размер коробки для стандартной версии (Д × Ш × В) — 340 мм × 300 мм × 400 мм
- Размер коробки для версии образования (Д × Ш × В) — 345 мм × 290 мм × 485 мм
Мудрость в форме и цветах
Лаконичный чёрно-белый дизайн и высокая продуктивность.



Рисование как магия
Dobot Magician поддерживает точность BMP, SVG и DXF 0,2 мм, делает штрихи,
лазерную гравировку, работает на коже и дереве.

Готовность стать ещё лучше
13 портов расширения и бесконечные возможности для разработчиков.

Dobot Blocky
Инструменты графического программирования: это удобная,
функциональная, интуитивно понятная система управления манипулятором.

Простота в использовании, быстрое включение, доступное обслуживание.
Высокоэффективное решение для малого бизнеса.
Компактность
Разместить робота можно в любом интерьере.

Если же вы уже стали обладателем манипулятора то, чтобы запустить Dobot, загрузите
программное обеспечение и файлы в соответствии с вашей моделью Dobot Arm.

Также предлагаем вашему вниманию:
Видео об использовании Добота в классе
Добот в ювелирной практике
Производственная линия видео первое
Производственная линия видео второе
Добот и линейные рельсы видео первое
Добот и линейные рельсы видео второе
Визуальная идентификация Доботом
Добот Волшебник: машинное обучение от Google
Особенности
Может использоваться в ювелирной практике
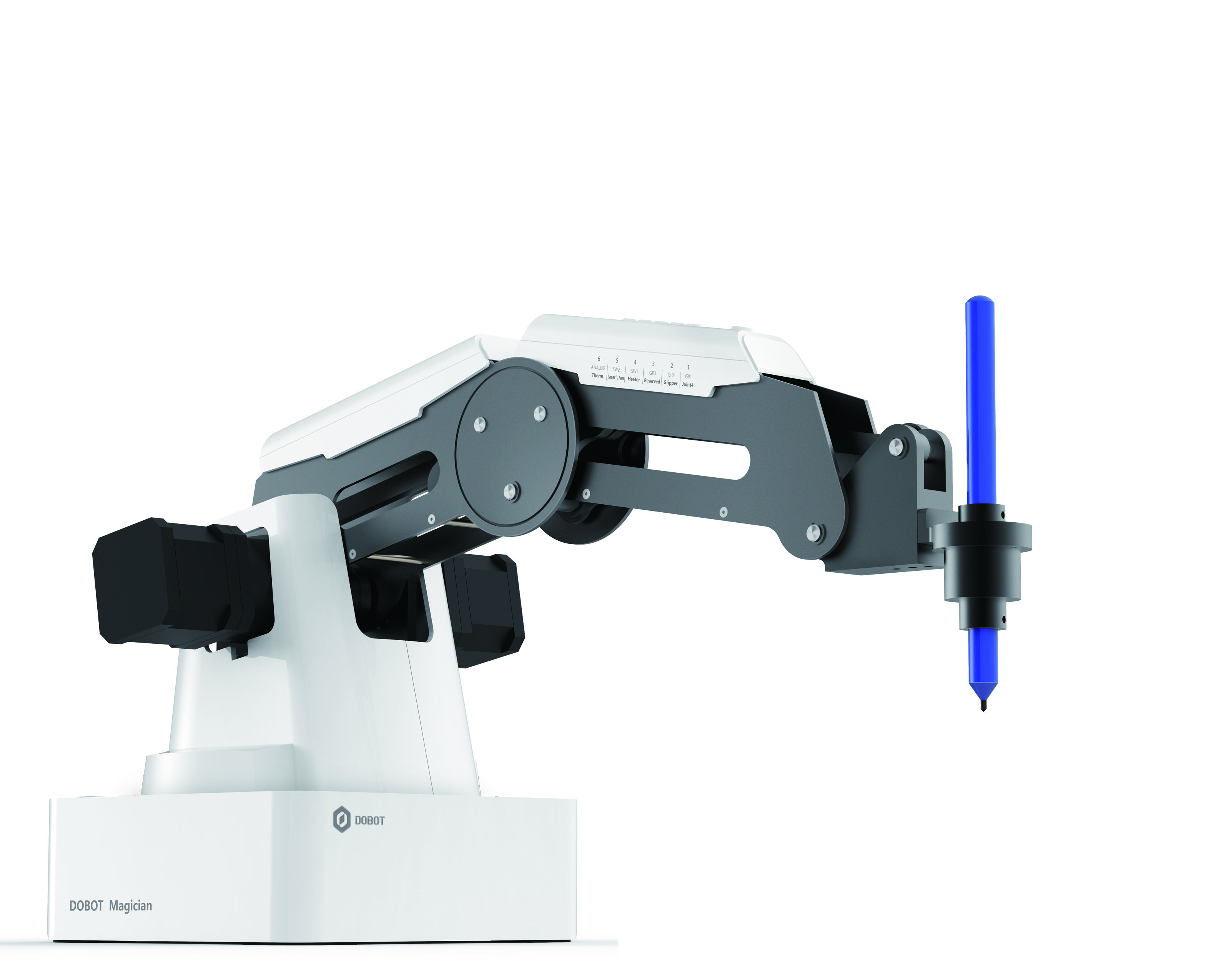
Учебный роботизированный манипулятор DOBOT Magician — это базовый робот для обучения искусственному интеллекту. Комплект оборудования подходит для начального уровня обучения. В набор входит плата управления Arduino Mega 2500, светодиодный индикатор, джойстик, кнопка переключения, модуль распознавания голоса и изображения.
Управлять DOBOT Magician можно с помощью кнопки, джойстика или голоса, что помогает исследовать искусственный интеллект во всех аспектах. Технология SmartyPlay на платформе с открытым исходным кодом позволяет изучить программирование и узнать и о преимуществах открытого кода.
Производитель предлагает несколько курсов, которые помогают научиться программировать манипулятор, получить знания об искусственном интеллекте и понять принцип работы с исходным кодом.
Преимущества робота DOBOT Magician
Роботизированный манипулятор с комплектом базовых принадлежностей идеально подходит для обучения. Комплект обучающих программ позволяет наглядно продемонстрировать особенности программирования и работу искусственного интеллекта.
Особенности DOBOT Magician:
- мощный двухъядерный процессор;
- открытый исходный код;
- несколько модулей управления;
- обучающие курсы в комплекте.
Вы можете купить учебный роботизированный манипулятор DOBOT Magician в нашем офисе в Москве, с гарантией и доставкой по России от официального дилера.
Робот-манипулятор — тип промышленных роботов. Такие роботы выполняют функции человеческой руки. Соединения сегментов манипулятора допускают вращательные и поступательные движения.
Роботы могут распознавать, понимать и менять окружающую среду. Их сфера деятельности каждый год расширяется. Внедряются новые программы, роботы могут выполнять всё более точные действия: собирать автомобили, сортировать мусор, выбирать только спелые плоды при сборе урожая.
Сегодня расскажем о том, где и как применяются манипуляторы.

Обзор применения
В зависимости от специфики, манипуляторы используются в разных отраслях промышленности и выполняют разные задачи. Но все они призваны улучшить условия труда работников и снизить расходы предприятия.
Роботы-манипуляторы — решение для тех сфер, в которых часто случаются ошибки из-за человеческого фактора. Там, где человеку не хватает скорости реакции или существуют опасные условия, приходит на помощь робот.
Автомобильная промышленность
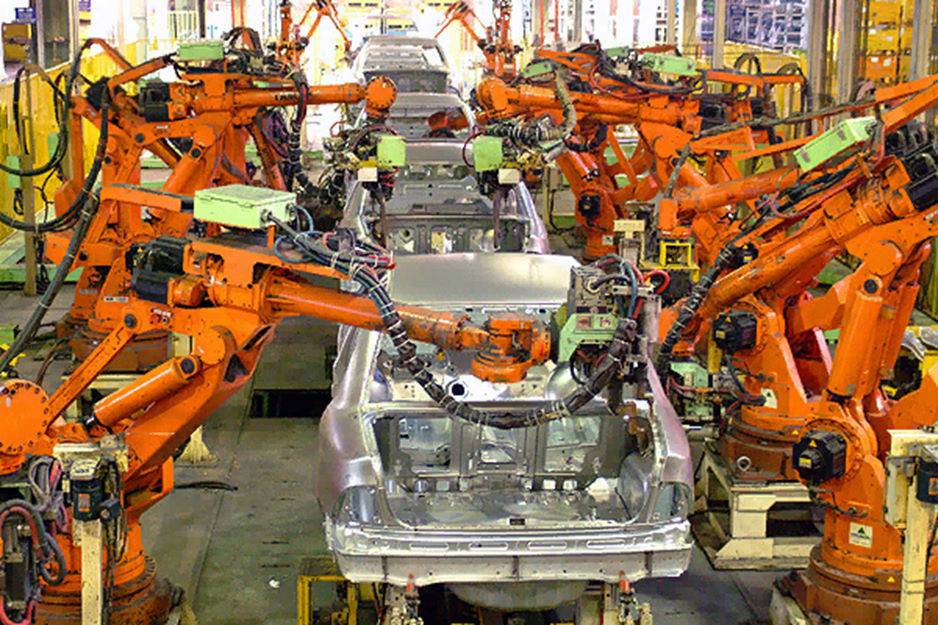
Использование роботов-манипуляторов в этой сфере позволяет выполнять одновременно несколько задач быстро и точно.
Их используют для литья, штамповки, сварки, переноса грузов, установки деталей, сборки кузова и других работ. Роботы-манипуляторы в машиностроении обеспечивают беспрерывное производство.
Электротехника, электроника
В сфере электроники важна точность, скорость, умение работать с мельчайшими деталями. Рука робота-манипулятора не дрогнет и выполнит задачу быстрее, чем это сделали бы люди.
Сравните работу робота и человека в видео, в котором робот собирает жесткий диск:
Строительство

В этой отрасли роботы-манипуляторы помогают строить здания, ориентируясь на информационную модель. Это помогает избежать ошибок установки, ускорить процесс строительства, уменьшить количество отходов.
К тому же с помощью манипуляторов можно строить сложные геометрические формы.
Химическая промышленность

Это сфера контакта с опасными веществами. Внедрение роботов-манипуляторов в химическую промышленность минимизирует участие людей в процессах производства.
В сферах, где присутствие человека обязательно, используются специальные коллаборативные роботы, которые взаимодействуют с работниками.
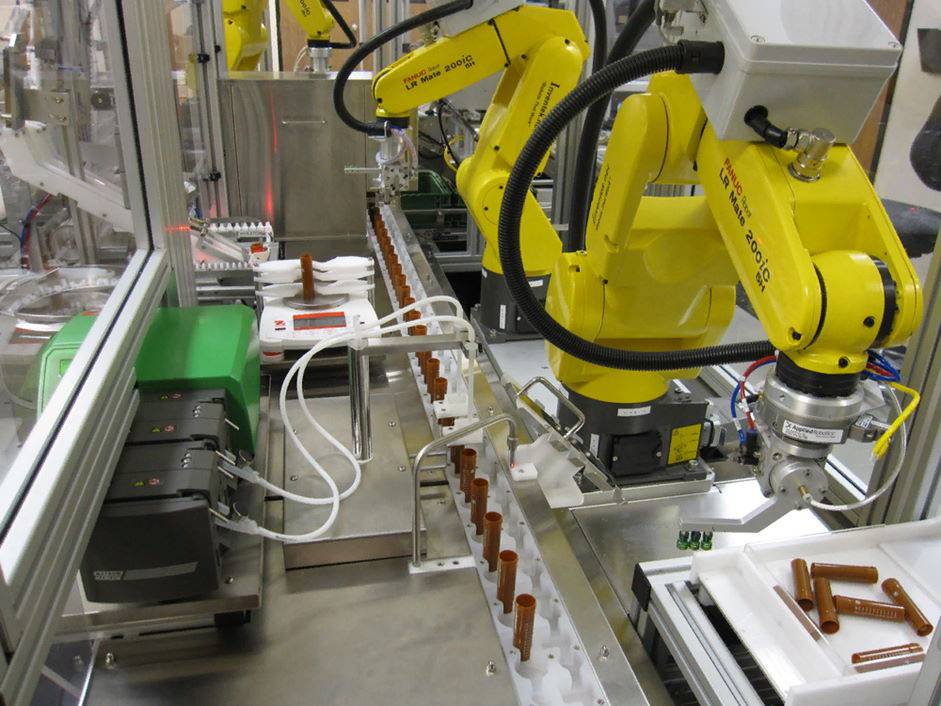
Медицина и фармацевтика
Здесь тоже используются коллаборативные роботы-манипуляторы, которые помогают врачам проводить сложные операции. Такие манипуляторы обычно сверхчувствительные, имеют биосовместимое покрытие.
Также часто используются манипуляторы для создания и упаковки фармацевтических препаратов и мединструментов.
Иные области
Роботы-манипуляторы используются и в других отраслях. Их можно запрограммировать практически на любой ручной труд.
Автоматизация производства с помощью роботов-манипуляторов позволит предприятиям увеличить скорость работы, снизить расходы и повысить рентабельность.
Если вы уже сделали выбор в пользу автоматизации и ищете оборудование для роботов, мы с радостью проконсультируем вас.