Вычисления в реальном времени
Приложения реального времени накладывают определенные требования: это скорость расчета алгоритмов управления системы с обратными связями и быстрая реакция на внештатные события. Микроконтроллеры C2000 построены на проприетарном ядре компании Texas Instruments — С28x, что делает их уникальными на рынке аналогичных устройств. Для расчета различных регуляторов в этих микроконтроллерах реализовано несколько вычислительных блоков (рис. 1).

Рис. 1. Вычислительные ресурсы C2000
Основным вычислительным модулем микроконтроллера является CPU — Central Processing Unit, частоту тактирования которого можно выбрать из диапазона 40–300 МГц. В CPU реализована аппаратная поддержка DSP-функций, позволяющая выполнять атомарные операции (чтение-изменение-запись) и умножение 32‑битных чисел за один цикл. CPU производит вычисления с фиксированной точкой.
Для увеличения производительности в C2000 есть несколько дополнительных вычислительных узлов. Для математических операций с плавающей точкой предусмотрен модуль FPU. Благодаря модулям VCU и CLA есть возможность разгрузить основное CPU-ядро и использовать его для дополнительных задач. Блок VCU (Vitterbi & Complex Math & CRC Unit) выполняет вычисления комплексной математики (быстрое преобразование Фурье, реализация цифровых фильтров) и обработку информации в телекоммуникационных приложениях, в частности, расчет контрольной суммы CRC и декодирование Витерби.
CLA (Control Law Accelerator) представляет собой отдельный сопроцессор с поддержкой плавающей точки, который работает параллельно с основным CPU и используется для обработки критичных по времени участков программы. CLA позволяет реализовать минимальную задержку между получением информации о регулируемом объекте посредством АЦП и воздействием на него необходимым периферийным модулем.
Дополнительным ускоряющим работу фактором является наличие контроллера прямого доступа к памяти DMA. Этот контроллер позволяет осуществлять обмен данными между различными периферийными модулями и внутренней памятью микроконтроллера без участия основного ядра CPU. Модуль DMA содержит до 32 каналов обмена данными.
Во всем семействе микроконтроллеров C2000 можно выделить три основных подсемейства: Piccolo, Delfino и Concerto (рис. 2), а также небольшую группу устройств, не попавших в эти направления. Разнообразие модельного ряда устройств на базе ядра C28x позволяет разработчику выбрать наиболее оптимальное устройство для решения конкретной задачи.

Рис. 2. Направления и свойства С2000
Направление Piccolo включает в себя микроконтроллеры с тактовой частотой до 90 МГц, которые могут опционально содержать дополнительные модули VCU, FPU и CLA. Практически все устройства серии Delfino, за исключением высокотемпературной модели, содержат модуль FPU. Тактовая частота микроконтроллеров этой серии достигает 300 МГц. Самым мощным представителем C2000 является подсемейство Concerto. Устройства этого подсемейства являются двухъядерным решением: дополнительно к ядру C28x добавлено ядро ARM Cortex M3, а также модули FPU и VCU. Всего в семейство микроконтроллеров C2000 входит более 150 совместимых по коду устройств, цена которых начинается от $3.
Аппаратные особенности
АЦП
Одним из основных узлов любой системы управления является аналого-цифровой преобразователь. Скорость работы 12‑битного ядра модуля АЦП в микроконтроллерах C2000 достигает 12,5 MSPS. Модуль АЦП содержит два устройства выборки и хранения и два восьмиканальных мультиплексора, что позволяет синхронно обрабатывать до восьми пар внешних сигналов. Запуск преобразования может осуществляться как программно, так и от аппаратных событий модуля ШИМ, внутренних таймеров либо внешних выводов. Структурная схема модуля АЦП представлена на рис. 3.

Рис. 3. Структурная схема модуля АЦП
Аналоговый компаратор
Компаратор, реализованный в C2000, имеет две ключевые особенности.
Первой из них является возможность подключения к инвертирующему входу встроенного 10‑битного ЦАП. Этот ЦАП позволяет управлять порогом срабатывания компаратора, и его можно использовать для различных установок защиты в приложениях управления.
Второй особенностью компаратора является непосредственная связь с модулем ШИМ. В случае срабатывания компаратора выводы ШИМ устанавливаются в необходимое разработчику состояние, независимо от сигнала тактирования системы. Переключение выводов происходит в блоке обработки ошибки модуля ШИМ (рис. 4).

Рис. 4. Блок-схема модуля ШИМ
Эта особенность используется для быстрой реакции на внештатные события (перегрузка по току, короткое замыкание и др.). Количество встроенных аналоговых компараторов зависит от конкретной модели устройства.
ШИМ
В контроллерах серии C2000 содержится от 4 до 12 аппаратных модулей широтно-импульсной модуляции, каждый из которых имеет по два вывода с возможностью независимой модуляции. Помимо стандартных функций формирования симметричного и фронтового ШИМ-сигнала, поддерживаются аппаратные функции формирования «мертвой зоны» (для учета времени задержки переключения силовых ключей) и модуляция ШИМ-сигнала высокочастотной составляющей (для силовых приборов с импульсными трансформаторами в цепи управления).
Регистр периода и регистры сравнения снабжены дополнительными буферными регистрами, которые в официальной документации называются теневыми. Использование теневых регистров дает возможность загружать значение в активный регистр строго в определенный момент, синхронно с аппаратным событием. Это позволяет избежать ошибок и ложных срабатываний, которые могут возникнуть при непосредственной асинхронной записи в активный регистр.
С помощью блока обработки ошибки можно перевести выводы PWM_A и PWM_B в зависимости от требований приложения в единичное или нулевое состояние при появлении сигнала ошибки. В качестве последнего могут выступать до трех внешних сигналов и выходы встроенных компараторов.
Отдельно следует отметить наличие модуля ШИМ высокого разрешения — HRPWM. В этом модуле реализована технология MEP (micro edge positioner) — микропозиционирование фронта импульса. Использование этой технологии позволяет получить минимальную ширину импульса ШИМ-сигнала (65 пс в семействе Delfino C2834x). Этому же значению равно и минимальное приращение ширины между двумя соседними импульсами.
Интерфейсы передачи данных
Для обмена данными микроконтроллеры семейства С2000 содержат как стандартные для микроконтроллеров общего назначения интерфейсы I2C, SPI и SCI (более известный как UART), так и более специализированные — McBSP, eCAN, LIN.
Из особенностей следует отметить, что в модуле SPI реализована настраиваемая длина передаваемого слова — от 1 до 16 бит. Модули SCI и SPI содержат четырехуровневый FIFO-буфер приемопередачи.
Разработка приложений для С2000
Для разработки приложений для микроконтроллеров C2000 компания Texas Instruments предоставляет программное приложение Code Composer Studio. CCS является интегрированной средой разработки для встраиваемых микропроцессоров и контроллеров. Code Composer Studio предоставляет весь набор инструментов, необходимых для разработки и отладки встраиваемых приложений. При установке среды можно выбрать необходимый пакет компиляторов под конкретное семейство микроконтроллеров Texas Instruments. В набор инструментов входят редактор кода, среда сборки проекта, отладчик, симуляторы, операционная система реального времени и многое другое.
Из инструментов отладки нужно отметить возможность вывода данных из памяти контроллера на экран в виде графика (рис. 5) с их автоматическим обновлением, что позволяет проводить отладку без дополнительных инструментов визуализации данных, таких как осциллограф. Очень удобна функция изменения данных в памяти контроллера «на лету», напрямую — через окно отображения Expressions (рис. 5). Code Composer Studio поддерживает установку на операционные системы Windows и Linux.
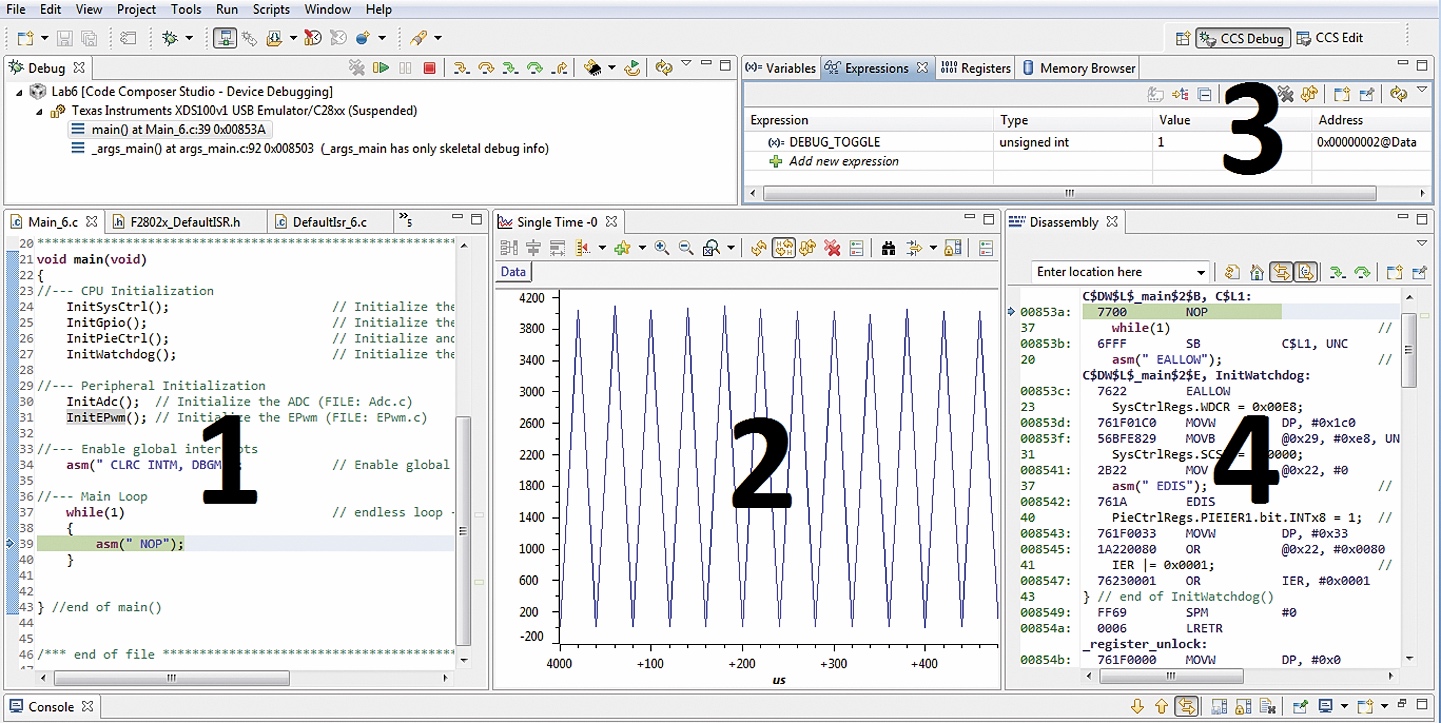
Рис. 5. Рабочее поле среды разработки Code Composer Studio:
1 — редактор исходного кода на Си;
2 — окно графика данных АЦП с обновлением в реальном времени;
3 — окно отображения данных с возможностью изменения «на лету»;
4 — окно с дизассемблированным кодом программы
Для поддержки разработчиков существует специальный ресурс знаний по микропроцессорам Texas Instruments [1], где представлено большое количество информации по встраиваемым процессорам этой фирмы. В частности, в разделе [2] представлено все необходимое для того, чтобы быстро приступить к использованию микроконтроллеров C2000 в новых разработках.
Предварительное знакомство с микроконтроллерами С2000 и оценку их возможностей можно выполнить на доступном отладочном средстве известной серии LaunchPad (рис. 6).

Рис. 6. Отладочное средство С2000 LaunchPad
Оно реализовано на базе контроллера TMS320F28027 подсемейства Piccolo. Кроме того, LaunchPad можно использовать как микропроцессорный модуль в более сложных системах.
Заключение
Микроконтроллеры семейства C2000 компании Texas Instruments оптимальны для реализации систем управления реального времени. Архитектура, основанная на DSP-ядре с использованием продвинутой периферии управления, делает их уникальными на рынке микропроцессорных решений. Среда разработки приложений Code Composer Studio с большим количеством примеров под конкретную модель семейства позволяет быстро начать разработку собственных проектов с расширенными возможностями отладки.
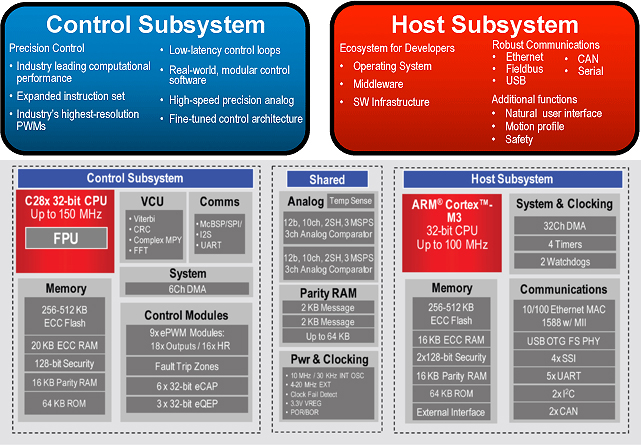
32-битные микроконтроллеры с двумя интегрированными подсистемами, обеспечивающие управление в реальном времени и богатые коммуникационные возможности
 |
Компания Texas Instruments анонсировала выпуск 32-битных микроконтроллеров серии C200 Concerto, которые объединяют в себе коммуникационную периферию и подсистему контроля на базе ядра Cortex-M3 (Host Subsystem) и высокопроизводительную подсистему управления в реальном времени на базе ядра C28x (Control Subsystem). Благодаря своим особенностям и возможностям микроконтроллеры идеальны для применения в солнечных инверторах, системах промышленного контроля и управления. |

 – новые PoL-стабилизаторы от MORNSUN для питания процессоров и иных компонентов в архитектуре распределенного питания")

Инженерия, разработка систем управления и коммуникационных приложений – эти области полны компромиссов. Это баланс между многочисленными аспектами – стоимостю, энергопотреблением, надежностью, функционалом, гибкостью и пр. С каждым поколением инженеры и разработчики все больше стараются повысить эффективность и функциональность своих систем. Цифровое управление предоставляет новые возможности в интеллектуальном и эффективном управлении системами. Кроме того, возможность подключения становиться все боле распространенной в приложениях, ранее не требовавших коммуникации. На сегодняшний день во многих приложениях управления в реальном времени (автоматизация и преобразование энергии) основной компромисс – найти баланс между надежным управлением и коммуникационными возможностями или функциями Host устройства.
Применение микроконтроллера С2000 Concerto полностью избавляет от этого нелегкого выбора. Объединяя ведущее в отрасли Host ядро и ведущее в отрасли ядро управления, микроконтроллеры Concerto предоставляют лучшее из двух областей в одном устройстве, что упрощает аппаратную и программную разработку, при одновременном сокращении затрат.
Ядро C28x – управление в реальном времени:
- рабочая частота до 150 МГц, встроенный модуль вычислений;
- цифровая обработка сигналов и фильтрация;
- возможность программной реализации модема для передачи данных по силовой сети;
- ШИМ с непревзойденной гибкостью, возможностью программирования и разрешением 10 пс;
- расширенный интерфейс квадратурного энкодера (eQEP), совместимый с почти любым линейным или поворотным энкодером для приложений управления двигателями;
- расширенная система захвата для высокой точности в таких приложениях как радары и ультразвуковое зондирование.
.jpg)
ARM Cortex-M3 (Host ядро):
- рабочая частота до 100 МГц;
- оптимизировано для Host коммуникаций:
- Ethernet;
- USB;
- CAN, последовательные интерфейсы;
- беспроводные интерфейсы.
Общие ресурсы/система:
- Flash-память программ до 1 МБайт;
- 132 КБайт RAM;
- два 12-битных АЦП (3 MSPS), 20 каналов;
- интеллектуальное управление;
- механизмы определения и корректировки ошибок в секторах Flash и RAM памяти;
- встроенная система мониторинга тактовой частоты;
- механизмы защиты памяти;
- встроенные аналоговые компараторы для реализации схем защиты по напряжению и току;
- дополнительные интегрированные модули для упрощения разработки аппаратной части:
- интегрированный высокоскоростной осциллятор и часы реального времени;
- встроенные схемы сброса при подаче питания и BOR;
- встроенный регулятор напряжения;
- отвечает квалификации Automotive Q100.
Блок-схема микроконтроллеров серии C2000 Concerto
Кликните для увеличения
С микроконтроллерами Concerto, многие приложения получают множество преимуществ от двух отдельных подсистем управления и контроля, в зависимости от области применения.
|
Системы промышленной автоматизации |
||
|
|
Host-система |
Преимущества:
|
|
Управление Высокоточные датчики |
||
|
|
||
|
|
Host-система |
Преимущества:
|
|
Управление |
||
|
|
||
 |
Host-система |
Преимущества:
|
|
Управление |


На данный момент в серию Concerto входит около 30 устройств F28M3x в 144-выводном корпусе TQFP, отличающихся объемом Flash-памяти программ, SRAM, рабочей частотой и количеством периферийных модулей.
Во всем мире в области цифрового управления электроприводом огромной популярностью пользуются так называемые DSC (Digital Signal Controllers) семейства С2000 компании Texas Instruments (TI). Такое предпочтение связано с высокой производительностью устройств, богатым набором периферийных модулей и быстрой реакцией на внешние события, а также оптимальным соотношением функциональность/цена. Появившиеся относительно недавно микроконтроллеры с ядрами Cortex-M3/R4F/M4F, представленные семействами LM3S, TMS570 и LM4F, позволяют создавать системы с пониженной потребляемой мощностью и богатым набором коммуникационных возможностей, повышенной надежностью и возможностью обсчета сложных алгоритмов управления приводом. Несмотря на то, что микроконтроллеры на базе ARM-ядер традиционно относятся больше к МК общего применения, с развитием специализированной периферии для управления приводами одним из преимуществ таких решений становится знакомая многим разработчикам архитектура ARM.
С появлением семейства двухъядерных микроконтроллеров Concerto (Cortex-M3 + C28xx) возможности разработчиков еще более расширились за счет разделения алгоритмов обмена с управляющей системой и управления движением на различные ядра. В данной статье представлены решения компании TI для управления электродвигателями на базе всех упомянутых выше семейств микроконтроллеров.
Основные типы электродвигателей
В настоящее время можно выделить шесть базовых типов электродвигателей:
- коллекторные (традиционные);
- бесколлекторные постоянного тока (BLDC), основанные на трехфазном синхронном двигателе переменного тока;
- шаговые — специальные BLDC-двигатели с зубчатым ротором/статором (зубья статора формируют «шаги», к которым притягивается обмотка или ответные зубья ротора);
- вентильно-индукторные (комбинация BLDC и униполярного шагового двигателя);
- трехфазные индукционные и синхронные переменного тока;
- однофазные переменного тока (например, с расщепленными полюсами).
Для каждого из перечисленных типов электромоторов существуют различные алгоритмы управления. Основную их часть можно разделить на частотные (когда частота вращения вала является функцией частоты питающего двигатель напряжения) и широтно-импульсные (ШИМ, когда частота вращения является функцией ширины импульса сигнала с постоянной частотой). Частотная схема управления в настоящее время применяется все реже за счет сложности и низкого КПД устройств управления. На смену ей приходит ШИМ-управление, которое, кроме регулировки частоты вращения, позволяет легко осуществлять и регулировку вращающего момента.
Таймеры с ШИМ входят в состав практически всех современных микроконтроллеров. В последнее время новые выпускаемые микроконтроллеры стали снабжать специализированными многофазными синхронными ШИМ с комплементарными выходами, специально предназначенными для управления движением.
Корпорация TI выпускает два основных семейства микроконтроллеров, снабженных соответствующими периферийными модулями: микроконтроллеры реального времени C2000 и стандартные Stellaris с ядром Cortex-M3 или Cortex-M4F. Большое количество референс-дизайнов, выпускаемых TI, позволяет подробно изучить как алгоритмы управления, так и схемотехнические особенности конструирования систем управления для каждого из типов двигателей.
Микроконтроллеры для управления электроприводами
Для управления электроприводами можно использовать микроконтроллеры четырех семейств, выпускаемых TI. Основные преимущества их применения приведены в таблице 1.
Таблица 1. Основные преимущества микроконтроллеров TI в системах управления электроприводами
| Семейство | Преимущества использования в системах управления электродвигателями |
| C2000 |
Максимальная производительность электродвигателей; промышленные и автомобильные Q100; средний уровень безопасности; широкий ассортимент. |
| Hercules TMS570/RM48L |
Максимальный уровень безопасности (ASIL-D, SIL-3); Q100 (TMS570); ARM; наибольший размер flash-памяти. |
| Stellaris LM3S/LM4F |
Дешевые ARM-микроконтроллеры; большое количество интерфейсов обмена данными; простота добавления O/S; начальный уровень безопасности (в оборудовании). |
| MSP430 | Минимальная стоимость; глубокое встраивание. |
32-разрядные микроконтроллеры реального времени C2000
Платформа C2000 микроконтроллеров реального времени является отраслевым лидером в создании цифровых систем управления электродвигателями с начала выпуска поколения TMS320F24x в 1996 г. В 2002 г. была представлена серия F281x, основанная на DSP-ядре C28x, ставшая первой серией с 32-разрядной архитектурой, специально созданной для высокопроизводительных систем управления с помощью алгоритмов, требующих интенсивных математических вычислений. С целью удовлетворить требованиям прикладных задач в отношении производительности, цены, назначения выводов и наличия периферийных модулей, на основе ядра C28x было создано семейство совместимых по коду микросхем.
MCU C2000 используются во множестве приложений на базе трехфазных электродвигателей, включая серводрайверы переменного тока, прецизионные системы управления движением, электронные рулевые приводы с усилителем, компрессоры и вытяжки на базе высоковольтных двигателей переменного тока, промышленные насосы и бытовую технику, например стиральные машины и компрессоры холодильников.
В настоящее время популярны два семейства — Piccolo и Delfino, отличающиеся ценой и вычислительными возможностями. В таблице 2 приведены примеры отладочных плат на базе МК серии С2000 с указанием типа привода и техники управления. Так же в этой таблице указано, для каких типов приводов существует графическая оболочка и файлы библиотек в программной среде controlSUITE, описание которой будет ниже.
Таблица 2. Применение микроконтроллеров Piccolo и Delfino в системах управления электродвигателями
| Тип мотора | Техника управления | Hardware | |||||
| Piccolo | Delfino | ||||||
|
Низкое напряжение. Две оси + PFC |
Высокое напряжение. Одна ось + PFC |
Низкое напряжение. Слабый ток |
Низкое напряжение. Сильный ток |
Низкое напряжение. Двойной полумост |
Высокое напряжение. Одна ось + PFC |
||
| TMDS1MTRPFCKIT; TMDS2MTRPFCKIT | TMDSHVMTRPFCKIT |
DRV8312-C2-KIT; DRV8332-C2-KIT |
DRV8301-HC-C2-KIT; DRV8302-HC-C2-KIT |
DRV8412-C2-KIT; DRV8432-C2-KIT |
TMDSHVMTRPFCKIT | ||
| Бесколлекторный постоянного тока | Трапецеидальный с датчиками | controlSUITE | controlSUITE | controlSUITE | — | — | — |
| Трапецеидальный без датчиков | controlSUITE | ||||||
| Синусоидальный с датчиками | SPRC922 | — | |||||
| Синусоидальный без датчиков | SPRC922 или controlSUITE | ||||||
| С постоянными магнитами | FOC с датчиками | controlSUITE | controlSUITE | controlSUITE | — | — | controlSUITE |
| FOC без датчиков | controlSUITE | ||||||
| FOC сервоэнкодер | — | — | — | — | |||
| Индукционный переменного тока | V/f Тахометр/энкодер | — | controlSUITE | — | — | — | — |
| FOC без датчиков | controlSUITE | ||||||
| FOC Sensorless | controlSUITE | ||||||
| Шаговый | Шаговый | — | — | — | — | controlSUITE | — |
| Коллекторный постоянного тока | Серво |
Семейство двухъядерных микроконтроллеров Concerto
Микросхемы семейства Concerto были долгожданными для разработчиков встраиваемых систем устройствами, поскольку позволяют разделить возлагаемые на ядро C28 задачи, связанные с объектом управления, и возлагаемые на ядро M3 задачи, связанные с обменом данными с централизованными системами управления и мониторинга. Микроконтроллеры Concerto разделены на три подсемейства, отличающиеся производительностью (рис. 1). Краткая характеристика микроконтроллеров Concerto приведена в таблице 3.
Таблица 3. Микроконтроллеры Concerto
| Серия микросхем | Производительность C28x/Cortex-M3, MГц | Память | Интерфейсы обмена данными |
| F28M35Hx | 150/75 или 100/100 |
До 1 Мбайт flash-памяти, 132 кбайт ОЗУ |
Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP |
| F28M35Mx | 75/75 | До 1 Мбайт flash-памяти, 132 кбайт ОЗУ | Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP |
| F28M35Ex | 60/60 |
До 1 Мбайт flash-памяти, 132 кбайт ОЗУ |
Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP |

Рис. 1. MCU Concerto
Хотя микроконтроллеры Concerto не обладают мощью двухъядерных прикладных процессоров с ядрами Cortex-A8 (ARM)+ C67xx корпорации TI, их производительности достаточно для решения большинства задач управления электроприводами.
Микроконтроллеры Stellaris ARM
Микроконтроллеры с ядром Cortex-M3 де-факто являются на сегодня стандартом для использования во встраиваемых приложениях. Они получили широкое применение за счет 32-разрядной архитектуры, хорошего соотношения цена/производительность, детерминированной реакции на прерывания, небольшой потребляемой мощности, наличия режимов пониженного энергопотребления. Росту популярности микроконтроллеров с ядром Cortex-M корпорации TI, входящих в семейство Stellaris (рис. 2), способствует выпуск большого количества микроконтроллеров с различным объемом внутренней памяти (в том числе встроенного ПЗУ с библиотекой для работы с периферийными модулями) и различным набором периферийных модулей, что позволяет выбирать микроконтроллеры конкретно под задачу. Дальнейшему росту популярности семейства способствует наличие большого количества мощных средств разработки и отладки, таких как Keil, IAR и, конечно, TI CCS 4.0 и 5.0, а также большое количество оценочных и отладочных модулей и референс-дизайнов готовых изделий.

Рис. 2. MCU Stellaris LM3S8971
В 2011 году к микроконтроллерам Stellaris LM3S с ядром Cortex-M3 добавились микроконтроллеры LM4F с ядром Cortex-M4F, которые отличают повышенная рабочая частота и производительность, расширенный набор команд, включающий команды цифровой обработки сигналов, и наличие сопроцессора арифметики с плавающей точкой (рис. 3). Все это позволяет реализовывать на микроконтроллерах LM4F более сложные алгоритмы управления.

Рис. 3. MCU Stellaris LM4F232H5
Минимальный «джентльменский набор» периферийных модулей микроконтроллера для управления электродвигателями должен включать следующие узлы:
- трехканальный синхронный ШИМ с комплементарными выходами, возможностью регулировки «мертвого времени» и входом аварийного отключения выводов;
- несколько каналов АЦП для наблюдения за различными параметрами в каждой из силовых фаз управления электродвигателем;
- квадратурный энкодер для установки вала в заданное начальное положение и наблюдения за его вращением;
- один из стандартных для промышленного применения управляющих портов — UART (для RS232/RS485), CAN или Ethernet-контроллер.
В таблице 4 приведены сравнительные характеристики микроконтроллеров Stellaris, используемых в референс-дизайнах систем управления электродвигателями от TI и удовлетворяющих всем четырем требованиям.
Таблица 4. Сравнительные характеристики микроконтроллеров Stellaris,
используемых в референс-дизайнах систем управления электродвигателями от TI
| Параметр | LM3S617 | LM3S818 | LM3S2616 | LM3S6965 | LM3S8971 | LM4F232 |
| F, МГц | 50 | 80 | ||||
| Flash, кбайт | 32 | 64 | 128 | 256 | ||
| ОЗУ, кбайт | 8 | 16 | 64 | 64 | 32 | |
| StellarisWare в ПЗУ | – | + | – | + | ||
| АЦП, модулей | 1 | 2 | ||||
| АЦП, разрядов | 10 | 12 | ||||
| АЦП, каналов | 6 | 4 | 8 | 22 | ||
| АЦП, МГц | 0,5 | 1,0 | ||||
| USB | – | O/H/D | ||||
| UART | 2 | 1 | 3 | 1 | 8 | |
| CAN | – | 1 | 0 | 1 | 2 | |
| Ethernet | – | MAC+PHY | ||||
| Таймеры управления движением | ШИМ, модулей | 1 | ||||
| ШИМ, выходов | 6 | 8 | ||||
| ШИМ, входы защиты | 1 | 8 | ||||
| Генераторы «мертвого времени» | + | |||||
| CCP (всего) | – | 4 | – | 4 | 6 | 24 |
| 64-разрядные CCP | – | |||||
| QEI, каналов | 1 | 2 | 1 | 2 |
Основой для управления электродвигателями служит ШИМ, упрошенная блок-схема которого приведена на рис. 4. Более детально один из каналов ШИМ показан на рис. 5.

Рис. 4. Упрощенная блок-схема ШИМ для управления электродвигателями микроконтроллеров Stellaris

Рис. 5. Блок-схема одного канала ШИМ для управления электродвигателями микроконтроллеров Stellaris
Генерация ШИМ-сигнала управления электродвигателями в микроконтроллерах Stellaris
В микроконтроллерах Stellaris имеется специальный блок — таймер (Motion Control Timer), который позволяет формировать от одного до четырех синхронных комплементарных ШИМ-сигналов для управления силовыми полумостовыми каскадами. Эти сигналы можно использовать не только для управления электродвигателями, но и для создания многофазных и/или многоканальных полумостовых DC/DC-преобразователей.
Рассмотрим работу ШИМ-генератора.
Таймер ШИМ
Таймер каждого из генераторов с ШИМ может работать в одном из двух режимов: вычитания (Count-Down) или сложения/вычитания (Count-Up/Down). В режиме Count-Down счетчик таймера считает от загруженного значения до нуля, возвращается к загруженному значению и продолжает счет на уменьшение. В режиме Count-Up/Down счетчик таймера начинает считать от нуля до загруженного значения, затем считает до нуля, затем снова до загруженного значения и т. д. В общем случае режим Count-Down используется для генерации ШИМ-сигналов, выровненных вправо или влево (так называемая фронтовая ШИМ), в то время как режим Count-Up/Down используется для генерации ШИМ-сигнала, выровненного по центру (так называемая центрированная ШИМ).
Компаратор ШИМ
В каждом генераторе с ШИМ имеется по два компаратора, которые отслеживают значение в счетчике. Когда значение, записанное в компараторе, совпадает со значением, записанным в счетчике, на выходе появляется импульс высокого уровня длительностью в 1 такт. В режиме Count-Up/Down эти компараторы отслеживают значения как при увеличении содержимого счетчика, так и при уменьшении; поэтому они квалифицируются сигналом направления счета. Квалифицирующий импульс используется при генерации ШИМ-сигнала. Если значение, загруженное в компаратор, больше, чем значение счетчика, то на выходе компаратора возникает импульс высокого уровня.
На рис. 6 и 7 показано поведение счетчика и временные соотношения между импульсами при работе счетчика в режимах Count-Down и Count-Up/Down.

Рис. 6. ШИМ в режиме Count-Down

Рис. 7. ШИМ в режиме Count-Up/Down
Генератор ШИМ-сигнала
Далее импульсы поступают на ШИМ-генератор, который формирует два ШИМ-сигнала. В режиме Count-Down имеется четыре события, которые могут влиять на ШИМ-сигнал: ноль, загрузка, достижение счетчиком значений A и B. В режиме Count-Up/Down таких событий шесть: ноль, загрузка, достижение счетчиком значений A и B при счете «вверх» и «вниз». Если значение A или B равны 0 или загруженному значению, то соответствующие события не возникают. Если значение A равно B, то первый сигнал (PWMA) генерируется в ответ на событие A, а второй сигнал (PWMB) генерируется в ответ на событие B. Для каждого события программируется уровень сигнала на выходе ШИМ: он может оставаться неизменным (событие игнорируется), переключаться, переходить в состояние Low или High. Эти действия можно использовать, чтобы сгенерировать пары ШИМ-сигналов с различным расположением и шириной, которые могут как перекрываться, так и не перекрываться. На рис. 8 показано использование режима Count-Up/Down для генерации пар выровненных по центру перекрывающихся ШИМ-сигналов, которые имеют различную скважность.

Рис. 8. Пример работы ШИМ в режиме Count-Up/Down
Генератор «мертвого времени» (Dead-Band)
Два сигнала, выработанные ШИМ-генератором, поступают на генератор «мертвого времени». Если он выключен, то ШИМ-сигналы проходят через него без изменений, а если включен, то между сигналами управления верхним и нижним силовыми ключами комплементарной пары вводится задержка с программируемым временем. Эта функция необходима для того, чтобы система управления была независима от динамических характеристик управляемых силовых приборов. Отсутствие «мертвого времени» может привести к тому, что один из ключей в комплементарной паре после снятия сигнала управления не успеет выключиться, в то время как на второй уже будет подан сигнал включения, это приведет к возникновению сквозных токов и может вывести пару силовых транзисторов из строя.
Выбор прерывания/запуска АЦП
ШИМ-генератор использует события компаратора для генерации прерываний или запуска АЦП. В качестве источника прерываний можно выбрать любое из событий или их комбинацию. Кроме того, события или их комбинации можно выбрать для запуска АЦП. Выбор событий позволяет вырабатывать прерывание или сигнал запуска АЦП в заданном положении ШИМ-сигнала. Эта функция может быть полезна, например для измерения тока в середине длительности сигнала ШИМ, когда отсутствуют помехи, связанные с коммутацией силовых ключей.
Методы синхронизации
Имеется возможность глобального синхронного сброса одного или нескольких счетчиков ШИМ-генераторов. Если они запрограммированы для работы в одинаковых режимах, то это можно использовать, чтобы гарантировать, что все счетчики имеют одно и то же значение счета. В таком режиме можно вырабатывать более двух сигналов с известным соотношением между их фронтами, поскольку все счетчики имеют всегда одинаковые значения.
Значения, загружаемые в счетчики и компараторы ШИМ-генераторов, можно обновлять двумя способами. Первый — это режим немедленного обновления, когда новое значение загружается при достижении счетчиком нуля. Ожидание достижения счетчиком нуля гарантирует предсказуемость поведения и препятствует появлению разрывов в импульсах. Второй метод — синхронный, когда новое значение не используется до прихода глобального импульса синхронизации. С этого момента новое значение начнет использоваться, как только счетчик достигнет нуля. Данный режим позволяет одновременно обновлять множество элементов ШИМ-генератора. Также режим обновления можно выбрать для каждого блока ШИМ-генератора независимо.
Аварийные ситуации
Имеются два внешних условия, которые влияют на блок ШИМ: поступление сигнала на вход защиты ШИМ и остановка контроллера отладчиком. Для отработки этих ситуаций имеются два механизма: можно перевести выходной сигнал в неактивное состояние и/или остановить таймер ШИМ. Отработка аварийных ситуаций производится без вмешательства микроконтроллера. Для сигнализации микроконтроллеру о возникновении аварийной ситуации может генерироваться прерывание. ШИМ-генераторы можно сконфигурировать таким образом, чтобы они останавливались при остановке микроконтроллера отладчиком.
Блок управления выходами
Каждый из блоков ШИМ управляет двумя комплементарными выходами. Блок управления выходами осуществляет окончательное управление этими сигналами перед их подачей на выводы микроконтроллера.
Подключение силовых модулей к выходам ШИМ
Сигналы с комплементарных выходов каждого из ШИМ-генераторов, как правило через устройства гальванической развязки, подаются на двухтактные силовые каскады, которые и управляют режимом работы электродвигателя. Пример построения системы управления показан на рис. 9.

Рис. 9. Пример построения системы управления
Микроконтроллеры Stellaris ARM Cortex-M4F
Новые микроконтроллеры Stellaris ARM Cortex-M4F обладают превосходной интеграцией аналоговых модулей, сопроцессором с плавающей точкой, расширенным DSP-инструкциями набором команд и лучшей в классе экономичностью — наряду со всеми другими преимуществами, которые можно ожидать от микроконтроллеров Stellaris. Кроме того, семейство LM4F с ядром Cortex-M впервые изготавливается по 65-нм технологическому процессу, что обуславливает высокую производительность при малой потребляемой мощности и встроенной flash-памяти 32–256 кбайт. Все микроконтроллеры LM4F имеют встроенную EEPROM объемом 2 кбайт для хранения параметров конфигурации и других редко изменяющихся значений, чего так не хватало микроконтроллерам LM3S.
InstaSPIN-BLDC Solution
TI объявила о создании новейшей технологии управления электроприводами — InstaSPIN-BLDC. Нацеленная на BLDC-приложения с низкой стоимостью, она не нуждается в датчиках. Тестирование новой технологии на более чем 50 различных типах электродвигателей показало ее эффективность: все двигатели были запущены и вышли на нормальный режим работы за время, не превышающее 20 с. InstaSPIN-BLDC не требует знаний о параметрах работы конкретного электродвигателя, и необходима подстройка только одного меняющегося значения.
В отличие от других техник управления BLDC, не требующих наличия датчиков и основанных на синхронизации в момент перехода значений напряжения и тока через ноль, InstaSPIN-BLDC контролирует момент двигателя, чтобы определить, когда необходимо переключать обмотки. С помощью бесплатной графической оболочки GUI (рис. 10) пользователь может наблюдать за сигналом с электродвигателя на графике и устанавливать движок Flux Threshold, чтобы указать, при каком уровне момента необходимо коммутировать обмотки двигателя. Оптимальность коммутации можно проверить, наблюдая соотношение между фазами напряжения и тока, которые также отображаются.

Рис. 10. Графическая оболочка для управления электроприводами InstaSPIN-BLDC
Помимо возможности работать практически с любым BLDC-двигателем, InstaSPIN-BLDC демонстрирует высокую способность системы противостоять переходным процессам. При наблюдении за переходом через ноль всегда используется информация о предыдущих параметрах, что позволяет предсказать будущие события коммутации. Но в случае применения InstaSPIN-BLDC форма сигнала отслеживается в реальном масштабе времени, чтобы определить наилучший момент для коммутации. Резкие изменения скорости тут же будут отражены в форме сигнала таким образом, что при достижении заданной пороговой величины коммутация будет производиться в правильный момент времени.
Использование технологии InstaSPIN позволяет более правильно управлять электроприводом при низких оборотах. В отличие от сигнала момента, амплитуда сигнала ЭДС самоиндукции уменьшается на более низких оборотах, приводя к плохой производительности системы управления. InstaSPIN-BLDC допускает более плавное регулирование на низких оборотах и обеспечивает более надежный запуск электромотора даже при очень большой нагрузке.
Средство разработки controlSUITE
Бесплатное программное обеспечение для работы с периферией микроконтроллеров реального времени C2000 controlSUITE представляет собой комплексный набор элементов программной инфраструктуры и программных средств, которые значительно сокращают время разработки программного обеспечения. (рис. 11). В сontrolSUITE входят все необходимые инструменты, начиная с библиотек драйверов для различных периферийных устройств и вспомогательных программных модулей и заканчивая полноценными типовыми примерами для сложных системных приложений, которые могут использоваться на всех этапах разработки программного обеспечения и оценки его функционирования.

Рис. 11. Структура controlSUITE
controlSUITE содержит большое количество документации, библиотек функций, примеров использования и готовых решений для микроконтроллеров на базе ядра C2000, для поддержания которых в актуальном состоянии имеется возможность постоянного онлайнового обновления.
Все примеры проектов можно одним «кликом» мыши открыть в интегрированной среде разработки CodeComposer Studio (v4.0 или 5.0) для компиляции и загрузки в целевую аппаратную платформу.
Наборы для управления электродвигателями на базе C2000
Корпорация TI выпускает ряд наборов разработчика для проектирования систем управления электроприводами на базе управляющих модулей в формате ControlCard с микроконтроллерами C2000. Краткие описания основных наборов разработчика приведены в таблице 5.
Таблица 5. Наборы разработчика систем управления электроприводами
| Наименование | Назначение | Особенности |
| DRV8312-C2-KIT | Демонстрационный набор для управления трехфазными бесщеточными электродвигателями DRV8312 постоянного и переменного тока. |
Материнская плата трехфазного инвертора DRV8312 с управляющей картой Piccolo F28035 controlCARD, запрограммированной на управление двигателями через GUI. |
| TMDS1MTRPFCKIT | Набор для разработчиков систем управления двигателями и корректоров коэффициента мощности. |
Векторное управление одним двигателем и интегрированный ККМ, использующий один F28035. |
| TMDS2MTRPFCKIT | Набор для разработчиков сдвоенных систем управления двигателями и корректоров коэффициента мощности. |
Векторное управление двумя двигателями и интегрированный ККМ, использующий один F28035. |
| TMDSHVMTRPFCKIT |
Набор для разработки систем управления двигателями и корректора коэффициента мощности (PFC) высокого напряжения. |
Цифровое управление двигателями мощностью до 1,5 кВт и коррекцией коэффициента мощности до 700 Вт при помощи одного Piccolo. |
| DRV8412-C2-KIT | Набор для управления низковольтными коллекторными двигателями постоянного тока и шаговыми двигателями. |
Материнская плата блока питания DRV8412 (два полумоста 6 А ном. / 12 А пик. при 50 В) с управляющей картой Piccolo F28035 controlCARD, запрограммированной на управление всеми двигателями через GUI; эмуляция XDS100 с гальванической развязкой и последовательный коммуникационный порт. Два коллекторных двигателя (38 мм). Один шаговый двигатель (23Y кв.). 24-В источник питания. Интегрированная среда разработки CCStudio v4.x; ПО, документация на оборудование (схемы, файлы gerber, спецификации). |
Наборы разработчика на базе Stellaris
Набор разработчика DK-LM3S-DRV8312 для управления трехфазным бесщеточным двигателем постоянного и переменного тока на базе микроконтроллера Stellaris предлагает все необходимые аппаратные и программные инструменты, которые позволяют инженерам разрабатывать и макетировать встраиваемые приложения «из коробки». Набор содержит различный инструментарий для популярных сред разработки для ознакомления с микроконтроллером, документацию, полный дистрибутив пакета разработчика StellarisWare Firmware Development Package и необходимый набор кабелей.
DK-LM3S-DRV8312 спроектирован на базе микроконтроллера LM3S818, хорошо зарекомендовавшего себя в наборе RDK-ACIM.
Наборы референс-дизайнов на базе Stellaris
Корпорация TI выпускает законченные, открытые наборы референс-дизайнов, в состав которых входит прикладной модуль на базе микроконтроллера Stellaris, полный комплект кабелей, двигатели, адаптеры, ПО и конструкторская документация для демонстрации функциональных особенностей приложения (для полноценной демонстрации устройства, извлеченного из коробки).
Данные наборы можно использовать как в целях ознакомления с периферийными модулями для управления электродвигателями различных типов, встроенными в микроконтроллеры семейства Stellaris, так и в качестве образцов законченных решений для управления теми или иными электродвигателями. Характеристики и области применения каждого из референс-дизайнов для управления конкретным типом электродвигателя приведены в таблице 6.
Таблица 6. Характеристики и области применения референс-дизайнов для управления электродвигателями
| RDK-ACIM — референс-дизайн системы управления индукционным двигателем переменного тока | |
|
|
Возможные применения: бытовые электроприборы; управление двигателями HVAC для стационарной и световой рекламы; блоки управления промышленными трехфазными двигателями. |
| RDK-STEPPER — референс-дизайн системы управления шаговым двигателем | |
|
|
Возможные применения: двух- и трехосевое оборудование для навигационных систем CNC; оборудование для сортировки и отбора различных предметов; принтеры и сканеры специального назначения. |
| RDK-BLDC — референс-дизайн системы управления бесколлекторным двигателем постоянного тока с интерфейсом CAN/Ethernet | |
|
|
Возможные применения: малогабаритные приборы; электрифицированные инвалидные кресла и переносные устройства; насосные и вентиляционные системы. |
| RDK-BDC — референс-дизайн системы управления коллекторным двигателем постоянного тока с интерфейсом CAN | |
|
|
Возможные применения: малогабаритные приборы; электрифицированные инвалидные кресла и переносные устройства; насосные и вентиляционные системы. |




Заключение
Микроконтроллеры реального времени семейства С2000 продолжают развиваться. Для ускорения разработок и времени выхода на рынок корпорация TI продолжает расширять номенклатуру демонстрационных и отладочных плат для них. Модули в формате DIMM позволяют с минимальными затратами переносить отлаженные решения на целевые платформы.
Ставшее привычным для многих разработчиков систем управления семейство микроконтроллеров Stellaris продолжает пополняться новыми микросхемами. Лучший для создания систем управления электроприводами малой и средней мощности с интерфейсом RS-485 микроконтроллер LM3S818 получил свою вторую жизнь благодаря новому набору разработчика DK-LM3S-DRV8312 от TI.
Комбинация отлаженных алгоритмов обмена данными для ядра M3 и алгоритмов управления для ядра C28, а также грамотно построенный интерфейс межпроцессорного взаимодействия в микроконтроллерах Concerto позволяют утверждать, что они найдут достойное применение для модернизации существующих и проектирования новых систем управления электроприводами.
Корпорация Texas Instruments предлагает конкурентоспособные микроконтроллеры для встраиваемых приложений, а также средства разработки и отладки для них, позволяющие значительно сократить время проектирования устройств управления и сделать процесс разработки и отладки более комфортным.
Литература
- Stellaris ARM Cortex-M-based Microcontrollers. http://www.ti.com/lsds/ti/microcontroller/arm_stellaris/overview.page
- Stellaris ARM CortexTM-M Microcontrollers Brochure. http://www.ti.com/lit/pdf/slab054
- 32 bit Real-time C2000 Microcontrollers. http://www.ti.com/lsds/ti/microcontroller/32-bit_c2000/overview.page
- C2000TM Real-Time Microcontrollers Brochure. http://www.ti.com/lit/pdf/sprb176
- 28x + ARM Cortex M3 Concerto Series. http://www.ti.com/mcu/docs/mcuproductcontentnp.tsp?sectionId=95&familyId=2049&tabId=2743#
- C2000 Concerto Microcontrollers Brochure. http://www.ti.com/lit/pdf/sprb203
- Motor Control Solutions Brochure. http://www.ti.com/litv/pdf/slyb165d
- Stellaris ARM Cortex-M-based Microcontrollers Tools Overview. http://www.ti.com/lsds/ti/microcontroller/arm_stellaris/kits_modules.page
- 3-Phase Brushless DC and AC Motor Control Kit (DK-LM3S-DRV8312). http://www.ti.com/tool/dk-lm3s-drv8312
- Stepper Motor Reference Design Kit (RDK-STEPPER) http://focus.ti.com/docs/toolsw/folders/print/rdk-stepper.html
- AC Induction Motor Reference Design Kit (RDK-ACIM) http://focus.ti.com/docs/toolsw/folders/print/rdk-acim.html
- Brushless DC Motor Reference Design Kit (RDK-BLDC) http://focus.ti.com/docs/toolsw/folders/print/rdk-bldc.html
- Brushed DC Motor Reference Design Kit (RDK-BDC) http://focus.ti.com/docs/toolsw/folders/print/rdk-bdc.html
- Brushed DC Motor Control with CAN Reference Design Kit (RDK-BDC24) http://focus.ti.com/docs/toolsw/folders/print/rdk-bdc24.html
- Stellaris ARM Cortex-M-based Microcontrollers Software. http://www.ti.com/lsds/ti/microcontroller/arm_stellaris/code_examples.page
- StellarisWare software. http://www.ti.com/tool/sw-lm3s
- C2000 Hardware Development Tools Overview. http://www.ti.com/lsds/ti/microcontroller/32-bit_c2000/tools.page
- High Voltage PFC and Motor Control Developer’s Kit (TMDSHVMTRPFCKIT). http://focus.ti.com/docs/toolsw/folders/print/tmdshvmtrpfckit.html
- DRV8312 Three-Phase Brushless Motor Control Kit (DRV8312-C2-KIT) http://focus.ti.com/docs/toolsw/folders/print/drv8312-c2-kit.html
- Low Voltage Brushed DC and Stepper Motor Control Kit (DRV8412-C2-KIT). http://www.ti.com/tool/drv8412-c2-kit
- DRV8301 Three-Phase BLDC & PMSM Motor Control Kit (DRV8301-HC-C2-KIT). http://www.ti.com/tool/drv8301-hc-c2-kit
- DRV8302 Three-Phase BLDC & PMSM Motor Control Kit (DRV8302-HC-C2-KIT). http://www.ti.com/tool/drv8302-hc-c2-kit
- Dual Motor Control and PFC Developer’s Kit (TMDS2MTRPFCKIT). http://www.ti.com/tool/drv8302-hc-c2-kit
- Motor Control and PFC Developer’s Kit (TMDS1MTRPFCKIT). http://www.ti.com/tool/tmdshvmpptkit
- controlSUITE Software. http://www.ti.com/mcu/docs/mcuproductcontentnp.tsp?sectionId=95&familyId=916&tabId=2656
- InstaSPIN-BLDC Solution. http://www.ti.com/ww/en/motor_drive_and_control_solutions/motor_control_instaspin_inside_bldc.htm
Компания Texas Instruments представила новые возможности связи на своих микроконтроллерах (MCU) C2000. 32-разрядные микроконтроллеры C2000 F2838x позволяют разработчикам использовать один чип для реализации возможности подключения, включая EtherCAT, Ethernet и сеть контроллеров с гибкой скоростью передачи данных (CAN FD), в сервоприводах переменного тока и других промышленных системах.
Для систем с интерфейсами связи часто требуется внешняя специализированная интегральная схема (ASIC) или выделенный микропроцессор для управления хостом, что ограничивает гибкость архитектуры проектирования, увеличивает сложность и занимает место на плате. Новые микроконтроллеры C2000 F2838x не требуют внешней ASIC, что сокращает общий размер решения и перечень материалов.
За счет интеграции трех промышленных протоколов связи микроконтроллеры F2838x дают разработчикам возможность адаптировать один микроконтроллер к уникальным потребностям каждой системы. Ключевым компонентом в достижении этого является новый диспетчер подключений, подсистема на базе Arm® Cortex®-M4, которая разгружает интенсивную обработку данных и оптимизирует подключение. В дополнение к этим возможностям микроконтроллеры C2000 F2838x предлагают улучшенные характеристики управления в реальном времени и более высокую гибкость, чем микроконтроллеры предыдущих серий C2000.
Основные характеристики и преимущества серии C2000 F2838x
- Интегрирует EtherCAT, Ethernet и CAN FD : для электрически изолированных архитектур в новых микроконтроллерах используется быстрый последовательный интерфейс с восемью каналами приема для облегчения межкристальной связи со скоростью до 200 Мбит / с с использованием минимального количества контактов. Разработчики могут опираться на этот высокий уровень интеграции в конструкции CAN FD и быстро увеличивать количество доступных портов CAN FD путем сопряжения F2838x с системным базовым чипом (SBC) TI, таким как TCAN4550 SBC со встроенным контроллером CAN FD и трансивером.
- Максимально увеличивает производительность управления в реальном времени : благодаря 64-битному блоку с плавающей запятой и быстрому аппаратному обеспечению с целочисленным делением центральный процессор C28x обеспечивает управление на основе дифференцированных возможностей и высокоточных конструкций. Для сервоприводов технология быстрой токовой петли обрабатывает полевое управление менее чем за 500 нс, чтобы обеспечить более точное управление положением.
- Гибкая интеграция датчиков облегчает управление в реальном времени : серия C2000 F2838x также включает несимметричный 16-битный аналого-цифровой преобразователь, который удваивает количество доступных каналов по сравнению с предыдущими микроконтроллерами C2000, чтобы минимизировать внешние компоненты и минимизировать время задержки системы. и максимизировать точность контура управления. Расширенный конфигурируемый логический блок позволяет разработчикам настраивать периферийные устройства и устраняет или снижает потребность в программируемой вентильной матрице.
Пакет, доступность и цены
Опытные образцы C2000 TMS320F28388D теперь доступны в магазине TI в упаковке с сеткой из 337 шариков. Цены начинаются с 14 долларов США за 1000 штук. Разработчики могут начать работу с комплектом разработчика C2000 TMDSCNCD28388D, доступным в магазине TI за 249 долларов. Комплекты для разработки программного обеспечения для управления двигателями и цифрового питания будут выпущены к концу июня. Для получения дополнительной информации о микроконтроллерах F2838x см. Www.ti.com/product/F2838x-pr.
Ознакомление с микроконтроллерами TMS320F28xx(x) фирмы Texas Instruments
Ознакомление с микроконтроллерами TMS320F28xx(x) фирмы TexasInstruments
Цель: Простыми словами рассказать об DSP микроконтроллерах Texas Instruments семейства TMS320F28xx(x). Статья направлена для с целью поверхностного знакомства. Статья про чип TMS320F28xxx первая, так как я только не давно начал на практике к ним подходить, и в статье может быть кое что ещё «сыро».
Однако, написанного тут должно быть достаточно, чтобы понять, что из себя представляет данное семейство DSP-микроконтроллеров, а также для чего его можно применить на практике. Будет только поверхностная информация, аналоги которой также можно найти в интернете. Так как на русском языке таких статей не так уж и много, то эта статья восполнит этот маленикий пробел.
Статья будет затрагивать основы для работы с чипами TMS320F2808 и TMS320F28335.
— TexasInstruments – американская фирма с центральным офисом в Далласе
— DSP – семейство контроллера
— TMS320F28xx(x) – название чипа
Общая информация: В обзоре будут рассматриваться 2 чипа, похожих по своим параметрам и наиболее популярные и, следовательно, и легко приобретаемые:
— TMS320F2808 — C2000 32 bit 28x Fixed-point Series
— TMS320F28335 — C2000 32 bit 28x Delfino™ Floating-point Series
Между собой два микроконтроллера TMS320F2808 и TMS320F28335 во многом идентичные, только TMS320F2808 немного скромней, а TMS320F28335 более навороченный, и об этом будет сказано ниже.
TMS320F28xx(x) – это одночиповое решение: Digital Signal Controller (DSC) + Digital Signal Processor (DSP) и все это иногда называют DSP и иногда для простоты восприятия «микроконтроллер».
На самом деле существует кроме C2000 еще и другие архитектуры(C5000, C6000), но мы их рассматривать тут не будем.
Микросхемы серии TMS320F28xx(x) – это вид цифровых сигнальных процессоров, с 32х битной шиной и имеет большой перечень микроконтроллеров в своём семействе.
Вы всегда сможете найти информацию более детально на сайте TI в раздела семейства TMS320F28 ядра C2000. C2000 – это дешевые и мощные DSP, с вычислительной мощностью у TMS320F2808 = 100MIPS и у TMS320F28335 = 150MIPS.
Некоторые из этих микроконтроллеров, например TMS320F28335, содержат «плавающую точку», в то время как у TMS320F2808 фиксированная точку.
Заметка: На сайте TI постоянно что-то меняется, так что используйте поиск.
Основные параметры, TMS320F2833x:
Семейство TMS320F28xxx из года в год пополняется новыми чипами, это можно увидеть из следующей картинки, она хоть и старая, но поясняющая политику компании Texas Instruments в отношении микроконтроллеров этого семейства.
Тут вы можете и оценить стоимость. Надо заметить, что сейчас цена существенно изменилась (информация на 2008г). Например, TMS320F2808 стоит около 11$.
Возможности DSPмикроконтроллера — F280x, F2801x, C280x
• High-Performance Static CMOS Technology
• JTAG Boundary Scan Support (1)• High-Performance 32-Bit CPU ( TMS320C28x™)
• On-Chip Memory
• Boot ROM (4K x 16) 267 ns
• Clock and System Control
• Any GPIO A Pin Can Be Connected to One of the Three External Core Interrupts• Peripheral Interrupt Expansion (PIE) Block That
• Three 32-Bit CPU Timers
|
• Enhanced Control Peripherals Resolution
• Serial Port Peripherals
• 12-Bit ADC, 16 Channels
• Up to 35 Individually Programmable, Multiplexed GPIO Pins With Input Filtering• Advanced Emulation Features
• Development Support Includes
• Low-Power Modes and Power Savings
• 128-Bit Security Key/Lock |
Для лучшего понимая, что из себя представляют микроконтроллеры о которых мы будем говорить далее, можно взглянуть на следующую таблицу.
Более наглядная и полная таблица, находится на сайте TexasInstruments.
Аббревиатура — DSP — ”Digital Signal Controller”.
Определим некоторые ключевые слова, которые часто используются, когда мы говорим о цифровой обработке сигналов, микроконтроллере и вычислениях в общем.
TMS320F28xxx принадлежит к группе устройств, которая называется: “Digital Signal Controller (DSC)”. В компьютерном восприятии, иногда люди подразумевают его как: “Microprocessor”, “Microcomputer” или “Microcontroller” для специфического описания электронного устройства. Тогда как он называется как цифровой сигнальный процессор — “Digital Signal Processors (DSP)”.
Чтобы избегать путаницы в будущем, давайте введем более точные определения:
- • Microprocessor (μP)
- • Micro Computer
- • Microcontroller (μC)
- • Digital Signal Processor (DSP)
- • Digital Signal Controller (DSC)
Нас интересует: что такое Microcontroller (μC):
– Центральное устройство для объединения устройств или устройств с малым или большим количеством других микросхем:
– Оперирующее другими устройствами, через встроенную периферию:
– Могут иметь любую из базовых архитектур:
» „VonNeumann“- Архитектура
» „Harvard“ – Архитектура
Нужно ещё кое-что пояснить относительно строения архитектур:
– „VonNeumann“ — Архитектура:
» Общая область памяти между кодом и данными
» Общая шина память между кодом и данными
» Например: Семейство Intel‘s x86 Pentium Processor
– „Harvard“ – Архитектура:
» Две или более независимых области памяти для кода и данных
» Две или более независимых системных шины памяти для кода и данных
Микроконтроллеры бывают с обеими архитектурами Von Neumann и Harvard. У TMS320F28xx(x) — архитектура гарвардского типа (Harvard).
Выглядит примерно так:
Функционально, схему микроконтроллера можно разделить следующим образом:
Что такое Микрокомпьютер «MicroComputer»:
– Микрокомпьютер => Микропроцессор(μP) + Память + Периферия.
Пример: Ваш Desktop –PC
Что такое Microprocessor (μP):
Периферия:
– Digital Input / Output Lines
– Analogue to Digital Converter (ADC)
– Digital to Analogue Converter (DAC)
– Timer / Counter units
– Pulse Width Modulation ( PWM) Output Lines
– Digital Capture Input Lines
– Network Interface Units:
» Serial Communication Interface (SCI) — UART
» Serial Peripheral Interface ( SPI)
» Inter Integrated Circuit ( I2C) – Bus
» Controller Area Network (CAN)
» Local Interconnect Network (LIN)
» Universal Serial Bus (USB)
» Local / Wide Area Networks (LAN, WAN)
– Graphical Output Devices
ЧтотакоеDigital Signal Processor (DSP)
Это новый тип микроконтроллеров, одночиповые решения, содержащие в себе мощь процессорных решений, зачастую математических, и обработки с встроенной периферией.
– Схож с Microprocessor(μP), то есть как ядро компьютерной системы.
– Дополнительный Hardware Units, для быстрого вычисления математических операций:
» Дополнительный Hardware Multiply Unit(s)
» Дополнительный Pointer Arithmetic Unit(s)
» Дополнительный Bus Systems for parallel access
» Дополнительный Hardware Shifter для масштабирования и/или умножения/деления на 2n
DSP очень часто содержит в себе алгоритмы:
— Finite Impulse Response Filter
— Infinite Impulse Response Filter
— Convolution
— Discrete Fourier Transform
— Discrete Cosine Transform
Что такое DSPTMS320F28xx(x):
TMS320F это еще одно процессорное ядро, с своей архитектурой, часто очень не похожей на привычные микроконтроллеры. Перед началом самостоятельного ознакомления я бы вам посоветовал немного погуглить. Если у вас есть вопросы, не стесняйтесь спрашивать что-то интересующее на форумах, это поможет.
Например, АЦП у них столь мудреный и гибкий, что некоторые вещи в силу своей неожиданности просто не сразу могут усесться в голове, в общем понимании. Так что, не брезгуйте спрашивать у людей, кто уже сталкивался с TMS320F28xx(x), это сэкономит ваше время.
Какие есть среды разработки под эти чипы:
На сайте Texas Instruments можно найти среду разработки CCS. Эта среда содержит в своем составе компилятор языка C/C++, а также конфигуратор для выбора отладчика или симулятора. Программа программатор, также входит в состав CCS.
Скачать можно по ссылке — http://www.ti.com/tool/ccstudio.
Прошивка и загрузка программы:
Фирма Texas Instruments предусмотрела много разных возможностей, вплоть до загрузки чипа с любой коммуникационной периферии.
Перед загрузкой программы, она должна быть предварительно записана в микроконтроллер, для этого в составе CCS есть предназначенная для этого утилита и вызывается она с рабочего проекта.
Однако версия на сайте, имеет ограничение по объему, до 32к. Если вам понадобится полная версия, там же на сайте можно её сразу купить.
Для примера возьмем TMS320F2833х (как более привлекательное семейство), и ознакомимся с ним.
Таким образом видно, что средствами микроконтроллера представлена возможность загружаться почти с всей коммуникационной периферии, I/O-шины и памяти.
Кроме всего, в дополнение всего вышесказанного, я хотел бы поделиться ссылкой на одну интересную е-книгу – TMS320F2812 DIGITAL PROCESSOR — IMPLIMENTATION TUTORIAL (если ссылка будет битая – гугл в помощь) в которой некоторые моменты расписаны лучше, чем в даташите.
Источник: http://www.uschema.com/oznakomlenie-s-tms320f28xxx/
Новые микроконтроллеры C2834x Delfino от Texas Instruments
Производительность, периферия и инструментальные средства разработки, ориентированные на задачи управления, обеспечивают быстрое и эффективное проектирование сервоприводов, а также систем для возобновляемых источников энергии и мониторинга линий электропередачи.
ХЬЮСТОН (3 марта 2009 года) – Приложения высшего уровня для управления должны соответствовать жестким требованиям эффективности, точности и надежности, поэтому требуют высокой производительности, точности операций с плавающей точкой и оптимизированных периферийных устройств.
Для удовлетворения потребностей разработчиков компания Texas Instruments Incorporated (TI) (NYSE: TXN) выпустила контроллеры TMS320C2834x Delfino, производительность операций с плавающей точкой которых вдвое превосходит существующие контроллеры TMS320C2000TM.
Новые устройства оснащены 516 КБ оперативной памяти, модулем широтно-импульсной модуляции (ШИМ) высокого разрешения и другими функциями, ориентированными на задачи управления.
Новые устройства Delfino поддерживаются двумя новыми инструментальными средствами controlCARD, предназначенными для увеличения скорости разработки приложений реального времени, например управление сервоприводами, возобновляемыми источниками энергии, мониторингом линий электропередачи и системой помощи водителю. Дополнительная информация доступна на сайте.
Основные характеристики и преимущества контроллеров C2834x Delfino:
ядро C28x с частотой 300 МГц для быстрой обработки прерываний, сокращения времени реакции системы, исполнения сложных алгоритмов управления и анализа данных в режиме реального времени; 32-разрядный модуль для выполнения операций с плавающей точкой облегчает программирование вычислений амплитуды, работает без масштабирования и насыщения, а также повышает быстродействие таких алгоритмов, как преобразование Парка и пропорциональное интегро-дифференциальное регулирование; 516 КБ оперативной памяти RAM на кристалле позволяет с высокой скоростью выполнять программы и осуществлять доступ к данным; универсальные модули ШИМ высокого разрешения обеспечивают оптимальную точность регулирования с разрешением до 65 пикосекунд; периферийные модули CAN, I2C, SPI и стандартный последовательный интерфейс (SCI) обеспечивает легкую подключаемость для организации взаимодействия системы; возможность использования внешних АЦП обеспечивает разработчикам свободу выбора из широкой палитры высокоточных аналого-цифровых преобразователей компании TI; совместимость программного кода платформы C2000 помогает разработчикам легко расширять продуктовые линейки и повторно использовать программный код для контроллеров в диапазоне частоты от 40 МГц (устройства PiccoloTM) до 300 МГц (Delfino).
Микросхемы C28343 и C28346 представляют собой первые устройства в серии C2834x. Вместе с ними выпущены controlCARD DIM100 и controlCARD DIM168 – модульные дочерние платы для установки в недавно анонсированные компанией TI комплекты для разработки управления возобновляемыми источниками энергии, резонансных DC/DC-преобразователей и периферийных устройств.
Texas Instruments поставляет аналоговые схемы и технологии управления питанием, которые дополняют контроллеры Delfino и повышают производительность приложений.
Аналого-цифровые преобразователи (АЦП) TI обеспечивают скорость обработки данных от 100 мегавыборок в секунду для 8-разрядных операций до 100 выборок в секунду для 32-разрядных операций.
Кроме того, широкий диапазон высокоэффективных решений TI позволяет разработчикам легче оптимизировать электропитание своих систем.
Источник: compel.ru
Источник: https://www.electronshik.ru/news/show/981
Texas Instruments интегрировала 16-разрядный АЦП в одноядерные микроконтроллеры C2000 Delfino F2837xS
» Новости » Микроконтроллеры
31-08-2014
Texas Instruments » Delfino F2837xS
Серия высокопроизводительных одноядерных микроконтроллеров, полностью совместимых с двухядерными микроконтроллерами С2000 Delfino, предназначенная для промышленных систем автоматизации и контроля, позволит создавать масштабируемые проекты систем управления электродвигателями, частотных преобразователей, преобразователей напряжения и систем преобразования возобновляемой энергии
Компания Texas Instruments представила серию мощных одноядерных 32-разрядных микроконтроллеров C2000 Delfino F2837xS для промышленных систем контроля реального времени.
Это первые в отрасли одноядерные микроконтроллеры с интегрированным 16-разрядным высокопроизводительным АЦП, который позволит реализовать прецизионные схемы обратной связи в приложениях преобразования напряжения и управления электродвигателями.
Отличительной особенностью представленных приборов является полная совместимость с недавно анонсированными двухядерными микроконтроллерами серии C2000 Delfino F2837xD.
По заявлению инженеров компании, новые микроконтроллеры смогут ускорить и упростить разработку приложений при масштабировании высокопроизводительных промышленных систем до систем управления и контроля среднего уровня.
Кроме того, одноядерные микроконтроллеры Delfino F2837xS являются решением следующего поколения для тех, кто использует предыдущую серию микроконтроллеров Delfino F2833x.
Разработчики могут использовать существующие наработки для Delfino F2833x и перенести их на программно-совместимые Delfino F2837xS, которые обеспечивают более высокую производительность и снабжены усовершенствованной периферией.
Отличительные особенности одноядерных микроконтроллеров серии C2000 Delfino F2837xS:
- Мощное сочетание ядра C28x и 32-разрядного математического сопроцессора (real-time control accelerator, CLA) обеспечивает комбинированную производительность 400 MIPS при выполнении вычислений с плавающей точкой, что позволяет реализовать быстрое и эффективное управление несколькими задачами одновременно. Ядро C28x дополнительно оптимизировано для выполнения тригонометрических и комплексных математических операций;
- Аппаратный блок ускорителя выполнения тригонометрических операций, встроенный в ядро C28x, и поддержка автоматического выполнения операций в компиляторе позволяют быстро выполнять тригонометрические алгоритмы, используемые в функциях преобразования и контроля;
- Ускоренное выполнение комплексных математических операций, обычно применяемых в приложениях зашифрованного обмена данными, стало возможным благодаря интеграции в ядро C28x аппаратного ускорителя Viterbi Complex Unit (VCU II) и поддержке соотвествующих возможностей компилятором;
- Интеллектуальное перераспределение системных ресурсов позволяет переложить ответственную задачу анализа в цикла управления на сопроцессор, увеличивая тем самым пропускную способность и и освобождая ресурсы основного процессора для выполнения других задач, например, для системной диагностики или управления приложением;
- Первые одноядерные микроконтроллеры с четырьмя 16-разрядными АЦП позволяют реализовать прецизионные схемы обратной связи в приложениях преобразования напряжения;
- Повышенная пропускная способность системы позволяет, например, реализовать контроль тока и напряжения трех фаз электродвигателя одновременно с программной обработкой данных обратной связи высокочастотного преобразователя;
- Максимальный уровень системной интеграции и минимизация количества внешних компонентов благодаря богатой аналоговой периферии, в том числе сигма-дельта демодуляторам, компараторам, ЦАП, и обилию интерфейсов управления и обмена данными;
- Встроенные блоки дельта-сигма фильтров с 8 входными каналами, каждый из которых снабжен пороговым компаратором, интерфейсом изолированного дельта-сигма модулятора AMC1230 и возможностью синхронизации с ШИМ;
- Упрощенная миграция от микроконтроллеров серии F2833x. Предыдущее поколение микроконтроллеров C2000, использующее ядро C28x и сходную периферию, программно совместимо с новой серией Delfino F2837xS, которая обеспечивает более высокий уровень производительности в обработке сигналов и снабжена высококлассной и надежной периферией;
- Ускоренное продвижение на рынок и снижение затрат на разработку приложений достигается благодаря возможности создавать устройства с различными уровнями производительности в пределах одной серии микроконтроллеров F2837xS, которые полностью совместимы с двухядерными микроконтроллерами F2837xD;
- Централизованная разработка приложений обеспечивается примерами, заголовочными файлами и библиотеками, которые доступны посредством программного комплекса controlSUITE.
Инструменты разработчика
Поскольку семейство микроконтроллеров Delfino F2837xS является масштабируемым и совместимо с Delfino F2837xD, для разработки можно использовать отладочную платформу Delfino F2837xD Experimenter Kit (TMDXDOCK28377D), в состав которой входит подключаемый процессорный модуль TMDXCNCD28377D.
Образцы микроконтроллеров, отладочная платформа Delfino F2837xD Experimenter Kit (TMDXDOCK28377D) и отдельный процессорный модуль (TMDXCNCD28377D) доступны для заказа.
Источник: https://www.rlocman.ru/news/new.html?di=152388
TI MCU Developing. Part -1: MCU Guide
Дисклеймер: Данная статья представляет собой коллекцию картинок и ссылок на каталоги и является базовой для последующих статей. Разработка на микроконтроллерах Texas Instruments. Часть -1: Обзор микроконтроллеров TI Решив после ARM Event перейти на с «ущербного AVR» на «TI ARM», я занялся серьезной подготовкой.
Перед тем, как броситься в омут, необходимо осмотреть номенклатуру процессоров, которые предлагает TI. Что-то было услышано с семинара(например Concerto или TIVA), с чем-то стоило повнимательнее ознакомиться. Под катом полезные ссылки, много картинок из pdf и немного лирики Немного лирики по поводу моей основательной подготовки.
Начну с того, что ранее я уже предпринимал попытку с наскока начать программировать TI — я купил часы ezChronos. Это отладочный комплект, состоящий из usb-свистка на 433МГц, USB отладчика и самих часов, внутри которых CC430F6137 со встроенным приемопередатчиком на 433МГц, LCD, датчик давления, датчик температуры. И все в виде часов. С наскоку не получилось, по многим причинам.
Основная — я писал проект на AVR и было не до новой платформы. Впрочем, я и прикидывал, что часы будут «прозапас» Во-вторых, после многосуточноготакинезаставления отладчика нормально интегрироваться с Eclipse а также знакомства с официальным Code Composer Studio v5 я принял решение его купить.
Да, это стоит $750, да, на торрентах есть ломаные версии, но я — организация, так что НАДО. Во-третьих, я закупил пару отладочных плат MSP430 launchpad и несколько TIVA-C отладочных плат на TM4C123 — с крутым фаршем. Под них уже делаются печатные платы некоторых шилдов, одни из них — измерительный шилд под трехфазку и GSM шилд.
Историческая справка: У меня уже пылятся купленные/халявные — STM8-Discovery, STM32-Discovery, Raspberry Pi, Altera FPGA, Xilinx FPGA 1200k cells… Про кучу в том числе самодельных Arduino вообще молчу 🙂 Наконец, я отдал задание поставить процессор в продакшн-версию нашего будущего контроллера, так что Обратного пути нет 🙂 В итоге, в продакшене у меня два процессора — сс430 и tm4c. Теперь по делу. Мы не будем затрагивать микропроцессоры, поскольку это весьма специфичная область. На сайте, разделение микроконтроллеров идет следующим образом:Из картинки можно понять, что у TI нет 8-разрядных микроконтроллеров. Все, хватит.
Начнем с MSP430
Я уверен, многие знают про этот микроконтроллер гораздо больше меня. В целом — 16-разрядные низкопроизводительные микроконтроллеры, известные тем, что имеют чрезвычайно низкое потребление.
Идеальный микроконтроллер для систем, от которых требуется сверхдлительная работа от батарей — потребление контроллера зачастую меньше, чем ток саморазряда батареи, что предполагает сроки работ вплоть до 20 лет.
Это могут быть медицинские сенсоры, системы сбора данных, контроллеры умных сетей и многое другое.
Более подробно об этих микроконтроллерах описано в MSP430 Selection Guide
Из приведенной картинки обратим внимание на серию G — это те самые DIP-контроллеры на MSP430 launchpad. Отдельно, в дальнейшем будем глубоко изучать эти контроллеры, заметим серию сс430. Это т.н. SoC — система на кристалле.
В один небольшой корпус, помимо самого контроллера MSP430 серии F поместили субГигагерцовый RF-модуль, для которого требуется лишь кварц и согласование с антенной.
Именно контроллер cc430 стоит в упомянутых часах:
Микроконтроллеры C2000
Позиционируются как 32-разрядные контролеры реального времени на базе проверенного временем ядра C28. Их существует несколько серий:
Picolo C38 MCU –
это решения формата low-cost, с частотой ядра до 90МГц. Особенностью процессоров Picolo является аппаратный блок VCU — Vitebri Control Unit — Блок, позволяющий производить аппаратное декодирование Витебри. Кроме этого, он умеет делать всякие CRC и тому подобное. Стоимость начинается от $1.85 за ядро с фиксированной точкой и от $4.95 за максимальный набор.
Delfino C28 Series –
это высокопроизводительные решения с частотой ядра до 300МГц. FPU содержит блок деления и возведения в степень, а также FFT и IIR акселераторы. На сайте TI они идут уже как Digital Signal Controllers, что определяет их назначение. Стоимость от $8 до $25.
Concerto C28+CotexM3 Series –
Микроконтроллеры, сочетающее в себе ядро реального времени C28, нацеленное на управление и ядро Cortex-M3, нацеленное на интерфейсы и взаимодействие. Ядра достаточно шустрые — до 150МГц для C28(причем в нем присутствует полный фарш в плане FPU), и до 125МГц для Cortex-M3.
Тут тоже не стали никого обеднять — и Ethernet MAC и куча UART-ов, SPI, I2C и прочее. К слову, на том ARM event я щупал отладочную плату именно с этим камнем. Думаю, впоследствии мы их затронем поближе.
Средние цены: F28M35Hx 150МГц / 75МГц, до 1Мб Flash, 132KB RAM, Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP $11.76 F28M35Mx 75МГц / 75МГц, до 1Мб Flash, 132KB RAM, Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP $9.
12 F28M35Ex 60МГц / 60МГц, до 1Мб Flash, 132KB RAM, Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP $6.71 F28M36Px 150МГц/75МГц, до 1Мб Flash, 232KB RAM, Ethernet, USB (OTG), SPI, SCI, CAN, I2C, McBSP $15.65
ARM контроллеры от TI
Рекомендую пролистать ARM Processors Selection Guide за 2Q, 2013 для полной картины. Здесь же упомяну только «особые» камни
Cortex-M4 TIVA Series
Про них я писал в отчете с ARM Event, поэтому расписывать принадлежности серий не буду. В настоящий момент существуют и выпускаются только «два» микроконтроллера серии TIVA-C — в прошлом — Stellaris (исправленное и дополненное)
TM4C123
Это нацеленный на коммуникации контроллер, имеющий «среднее» по скорости ядро — 80МГц и его основные фишки это — тонна интерфейсов, из которых стоит отметить USB OTG Full Speed, CAN и 12-bit АЦП Его стоимость в России от $9 до $14 в зависимости от требуемого количества.
TM4C129 — Первые Cortex-M4 c Ethernet MAC+PHY!(Да-да, PHY!)
до 1 МБайт Flash 256 Кбайт RAM, Драйвер LCD, шифрование и многое другое представленное на диаграмме. С Datasheet все сложно — требуется NDA, чтобы его получить. Умные головы вовсе сетуют на американские стандартны в блоках шифрования и опасаются что оно и вовсе не дойдет до определенных стран. Со стоимостью все еще хуже — Старт продаж TM4C129 на самом деле еще не начался — TI предлагает приобрести XM4C129 — буквой X обозначаются контроллеры серии eXperimental. Финальные контроллеры ждем на днях.
Hercules Cortex-
микроконтроллеры, сертифицированные для особо критичных систем, представлены тремя линейками контроллеров:
TMS470M, TMS570 и RM4x.
Главная их особенность — это соответствие стандарту IEC61508/SIL3(Safety Integrity Level 3 (SIL4 is Max)) — Стандарту, определяющему надежность устройства и гарантирующую определенную степень вероятности ошибок.
Достигается это встроенными в контроллеры системами безопасности, например такими как самотестирование процессора и оперативной памяти, наличие системы коррекции ошибок (ECC) и контроля четности.
TMS470M-
Одноядерные low-costмикроконтроллеры Cortex-M3 с частотой ядра до 80МГц, предназначенные для небольших, но важных важных систем автоматизации. В отличие от описанных ниже серий имеет все описанные выше блоки защит, но не имеет официальной сертификации SIL3 Стоимость контроллера: от $8.
TMS570 —
Первые процессоры Cortex-R4F с FPU, соответствующие упомянутому выше стандарту. Это двух-ядерные процессоры, с частотой ядра до 180МГц, предназначенные для систем управления электроприводом. Стоимость: TMS5703137 — $34 (farnell)
Серия RM4x
Эти двухядерные микроконтроллеры Cortex-R4F с частотой ядра до 220МГц, предназначены для создания производительных систем промышленной и медицинской автоматики. Стоимость(farnel): RM42L — $12 RM48L — $35
На сегодня это все. В следующий раз будем ставить CCS на Ubuntu и разбираться в ее компонентах!
Только зарегистрированные и авторизованные пользователи могут оставлять комментарии.
Источник: http://tqfp.org/parts/ti-mcu-developing-part-1-mcu-guide.html
From Wikipedia, the free encyclopedia

Texas Instruments TMS32020
Texas Instruments TMS320 is a blanket name for a series of digital signal processors (DSPs) from Texas Instruments. It was introduced on April 8, 1983 through the TMS32010 processor, which was then the fastest DSP on the market.
The processor is available in many different variants, some with fixed-point arithmetic and some with floating point arithmetic. The TMS320 processors were fabricated on MOS integrated circuit chips, including both NMOS and CMOS variants. The floating point DSP TMS320C3x, which exploits delayed branch logic, has as many as three delay slots.
The flexibility of this line of processors has led to it being used not merely as a co-processor for digital signal processing but also as a main CPU. Newer implementations support standard IEEE JTAG control for boundary scan and/or in-circuit debugging.
The original TMS32010 and its subsequent variants is an example of a CPU with a modified Harvard architecture, which features separate address spaces for instruction and data memory but the ability to read data values from instruction memory. The TMS32010 featured a fast multiply-and-accumulate operation useful in both DSP applications as well as transformations used in computer graphics. The graphics controller card for the Apollo Computer DN570 Workstation, released in 1985, was based on the TMS32010 and could transform 20,000 2D vectors every second.[clarification needed]
Variants[edit]
The TMS320 architecture has been around for a while so a number of product variants have developed. The product codes used by Texas Instruments after the first TMS32010 processor have involved a very popular series of processor named TMS320Cabcd where a is the main series, b the generation and cd is some custom number for a minor sub-variant.
For this reason people working with DSPs often abbreviate a processor as «C5x» when the actual name is something like TMS320C5510, since all products obviously have the name «TMS320» and all processors with «C5» in the name are code compatible and share the same basic features. Sometimes you will even hear people talking about «C55x» and similar subgroupings, since processors in the same series and same generation are even more similar.
The TMS320 processors are fabricated on MOS integrated circuit chips, including both NMOS and CMOS variants.[1]
Legacy series[edit]
- TMS320C1x, first generation 16-bit fixed-point DSPs. All processors in these series are code-compatible with the TMS32010.
- TMS32010, the very first processor in the first series introduced in 1983, using external memory
- TMS320M10, the same processor but with an internal ROM of 3 KB
- TMS320C10, TMS320C15, TMS320C25, etc.
- TMS320C3x, 32-bit floating point
- TMS320C30, 27 to 50 MHz, 8 KB internal SRAM, 5 Volt.
- TMS320C31, 27 to 60 MHz, 8 KB internal SRAM, 5 Volt, subset of TMS320C30 by removing 2nd serial port, removing 2nd memory bus, replacing user ROM with factory ROM bootloader.
- TMS320LC31, 33 to 40 MHz, 3.3 Volt version of TMS320C31.
- TMS320C32, 40 to 60 MHz, 2 KB internal SRAM, 5 Volt, adds 2nd DMA coprocessor, changes external memory bus to allow 8/16/32-bit wide memory access where as other C3x parts are 32-bit only.
- TMS320VC33, 60 to 75 MHz, 136 KB internal SRAM, 3.3 Volt I/O with 1.8 Volt Core, superset of TMS320C31 by adding 128KB internal SRAM.
- TMS320C4x, 32-bit floating point
- TMS320C40, 40/50/60/80 MHz, cycle time 50/40/33/25 ns, CMOS[2]
- TMS320C44, subset of TMS320C40
- TMS320C8x, multiprocessor chip[3]
- TMS320C80 MVP (multimedia video processor) has a 32 bit floating-point «master processor» and four 32-bit fixed-point «slave processors». In many ways the Cell microprocessor followed this design approach.
C2000 series[edit]
- C2000 microcontroller family consists of 32-bit microcontrollers with performance integrated peripherals designed for real-time control applications. C2000 consists of 5 sub-families: the newer C28x + ARM Cortex M3 series, C28x Delfino floating-point series, C28x Piccolo series, C28x fixed-point series, and C240x, an older 16-bit line that is no longer recommended for new development. The C2000 series is notable for its high performance set of on-chip control peripherals including PWM, ADC, quadrature encoder modules, and capture modules. The series also contains support for I²C, SPI, serial (SCI), CAN, watchdog, McBSP, external memory interface and GPIO. Due to features like PWM waveform synchronization with the ADC unit, the C2000 line is well suited to many real-time control applications. The C2000 family is used for applications like motor drive and control, industrial automation, solar and other renewable energy, server farms, digital power, power-line communications, and lighting. A line of low cost kits are available for key applications including motor control, digital power, solar, and LED lighting.
C5000 series[edit]
- TMS320C54x 16-bit fixed-point DSP, 6 stage pipeline with in-order-execution of opcodes, parallel load/store on arithmetic operations, multiply accumulate and other DSP enhancements. Internal multi-port memory. no cache unit.[4]
- A popular choice for 2G Software defined cellphone radios, particularly GSM, circa late 1990s when many Nokia and Ericsson cellphones made use of the C54x.[citation needed]
- At the time, desire to improve the user interface of cellphones led to the adoption of ARM7 as a general-purpose processor for user interface and control, off-loading this function from the DSP. This ultimately led to the creation of a dual core ARM7+C54x DSP, which later evolved into the OMAP product line.
- TMS320C55x generation – fixed-point, runs C54x code but adds more internal parallelism (another ALU, dual MAC, more memory bandwidth) and registers, while supporting much lower power operation.
- Today, most C55x DSPs are sold as discrete chips
- OMAP1 chips combine an ARM9 (ARMv5TEJ) with a C55x series DSP.
- OMAP2420 chips combine an ARM11 (ARMv6) with a C55x series DSP.
C6000 series[edit]

Texas Instruments TMS320C6726BRFP
- TMS320 C6000 series, or TMS320C6x: VLIW-based DSPs
- TMS320C62x fixed-point – 2000 MIPS/1.9 W
- TMS320C67x floating point – code compatible with TMS320C62x
- TMS320C64x fixed-point – code compatible with TMS320C62x
- TMS320C67x+ floating point – architectural update of TMS320C67x
- TMS320C64x+ fixed-point – major architectural update of TMS320C64x
- TMS320C674x fixed- and floating point – merger of C64x+ and C67x+
- TMS320C66x fixed- and floating point – backwards compatible with C674x
- Other parts with C6000 series DSPs include
- DaVinci chips include one or both of an ARM9 and a C64x+ or C674x DSP
- OMAP-L13x chips include an ARM9 (ARMv5TEJ) and a C674x fixed and floating point DSP
- OMAP243x chips combine an ARM11 (ARMv6) with a C64x series DSP
- OMAP3 chips include an ARM Cortex-A8 (ARMv7) with a C64x+ DSP
- OMAP4 and OMAP5 chips include an ARM Cortex-A9 or A15 (ARMv7) with a custom C64x+ derivative known as Tesla (or C64T)
C7000 series[edit]
|
|
This section’s factual accuracy may be compromised due to out-of-date information. The reason given is: Released in early 2020. Please help update this article to reflect recent events or newly available information. (August 2020) |
To be released.
DaVinci series[edit]
- The DaVinci series started with systems-on-a-chip using an embedded C6000 series (C64x+) DSP, ARM9 application processors, and Digital Media peripherals. There are variants without ARMs, and without DSPs. Their marketing focuses on their video processing capabilities. Original chips supported NTSC and PAL, while newer ones support HDTV.
OMAP variants[edit]
- OMAP variants also have an ARM processor in the same chip; see the main article on Texas Instruments OMAP. (There are also OMAP processors with other secondary processors, so these are not necessarily DSPs.)
DA variants[edit]
- DA variants (target «Digital audio»)
- DA25x is an ARM processor and a C55x core. It has some on-chip peripherals like a USB slave controller and security features. Documentation of this chip is only available after signing a Texas Instruments NDA. These variants are used exclusively in the Creative ZEN and Dell Digital Jukebox MP3 players, as the primary CPU and signal processor for all processing of MP3 data streams.
- TMS320DA7xx Aureus chips are built around C67x+ DSPs
- DA830/DA828 Aureus chips are based on the OMAP-L137, and include a 300 MHz C674x DSP and a 300 MHz ARM926ES-J core.[5] The DA828 variant has reduced I/O and comes in a 176-pin TQFP package instead of a 256-ball PBGA.
- DA610/601 is a processor with a C67x core. It has on chip peripherals needed to connect to audio codecs for a 5.1 or 7.1 system. This chip is used in the YAMAHA high end receivers : RX-V1400, RX-V2400, RX-V1600, RX-V2600, RX-V2500.[6]
DM variants[edit]
- DM variants:
- DM270 has an ARM7TDMI core and a TMS320 C5409 DSP
- DM320 has an ARM926 core and a TMS320 C5409 DSP
- DSC25 has an ARM7TDMI core and a TMS320 DSP
- Texas Instruments DaVinci chips
Other vendors[edit]
Die of the General Instrument DSP32010
General Instrument manufactured the TMS32010 as a second source.

Around 1991 a clone of the TMS320C20 was manufactured by ZMD under the designation U320C20FC.[7]

A number of devices from the TMS320 series are in production at NIIET Voronezh as the 1867 series,[8] including a radiation-hardened version of the TMS320C25 under the designation 1867VM7T (Russian: 1867ВМ7Т). Clones of the TMS320C546 went into production at PKK Milandr Moscow in 2009 under the designation 1967VC1T (Russian: 1967ВЦ1Т)[9] and in 2016 at MVC Nizhny Novgorod as 1910VM1T (Russian: 1910ВМ1Т).[10] PKK Milandr also manufactures a TMS320C54x with an additional ARM core as the 1901VC1T (Russian: 1901ВЦ1Т).[11]
Software support[edit]
The TMS320 series can be programmed using C, C++, and/or assembly language. Most work on the TMS320 processors is done using Texas Instruments proprietary toolchain and their integrated development environment Code Composer Studio, which includes a mini operating system called DSP/BIOS. Additionally, a department at the Chemnitz University of Technology has developed preliminary support for the TMS320C6x series in the GNU Compiler Collection.[12]
In November 2007 TI released part of its toolchain as freeware for non-commercial users, offering the bare compiler, assembler, optimizer and linker under a proprietary license.[13][14] However, neither the IDE nor a debugger were included, so for debugging and JTAG access to the DSPs, users still need to purchase the complete toolchain.
In 2010 Texas Instruments contracted CodeSourcery (the assignment later transferred to Mentor Graphics as part of their acquisition) to provide deep integration and support for the C6x series in GCC, as part of their effort to port the Linux kernel to C6x. This culminated in C6x being a supported architecture in GCC release 4.7 on March 22, 2012.[15]
See also[edit]
- XDAIS algorithms
- Ceva
- Qualcomm Hexagon
References[edit]
- ^ «TMS320C25». Texas Instruments. Retrieved 10 December 2019.
- ^ «TMS320C40». Texas Instruments. Retrieved 10 December 2019.
- ^ Guttag, Karl; (USA), Texas Instruments Inc. (June 7, 1996). «TMS320C8x family architecture and future roadmap». Digital Signal Processing Technology. 2750: 2. Bibcode:1996SPIE.2750….2G. doi:10.1117/12.241977. S2CID 60536785. Retrieved January 7, 2017. (subscription required)
- ^ http://www.ti.com/lit/ug/spru131g/spru131g.pdf[bare URL PDF]
- ^ this «LinuxDevices article». Archived from the original on 2013-01-28. includes more information
about this platform - ^ this «Archived copy». Archived from the original on 2009-12-28. Retrieved 2009-09-22.
{{cite web}}: CS1 maint: archived copy as title (link) site includes more information - ^ Heuer, Gert (1991). Digitaler Signalprozessor U320C20 [Digital signal processor U320C20] (in German). Berlin: Verlag Technik. ISBN 978-3341009987.
- ^ «DSP-процессоры» [DSP processors]. niiet.ru (in Russian). Voronezh: OAO «NIIET». Archived from the original on 26 June 2018. Retrieved 2 December 2019.
- ^ «1967ВЦ1Т (аналог TMS320C546)» [1967VC1T (corresponding to TMS320C546)] (in Russian). Moscow: PKK Milandr. 20 May 2009. Retrieved 9 January 2017.
- ^ «Микропроцессоры и микроконтроллеры» [Microprocessors and microcontrollers] (in Russian). Nizhny Novgorod: MVC. 2014. Archived from the original on 10 May 2017. Retrieved 18 April 2018.
- ^ «Двухъядерный микроконтроллер компании «Миландр» для высоконадёжных применений» [Dual-core microcontroller from Company «Milandr» for high-reliability applications] (PDF) (in Russian). Moscow: PKK Milandr. Archived from the original (PDF) on 27 April 2016. Retrieved 18 April 2018.
- ^ Jan Parthey and Robert Baumgartl, Porting GCC to the TMS320-C6000 DSP Architecture, Appeared in the Proceedings of GSPx’04, Santa Clara, September 2004, [1]
- ^ «TI frees its DSP toolchain». Archived from the original on 2013-01-27.
- ^ Free DSP Compiler Available Archived 2012-07-30 at archive.today
- ^ GCC 4.7 Release Series – Changes, New Features, and Fixes
External links[edit]
- DSP product tree at Texas Instruments
- Texas Instruments enters the DSP market historical article from TI
- C2000 low cost experimenter kits
- c6000 Discussion Forum at DSPRelated.com
- Linux-C6x[permanent dead link] a top page for the recent (as of 2012) GCC and Linux ports to C6x
- [2] memoir by T.I. manager on creation of TMS32010 Digital Signal Processor
- see Waves of Silence: Digisonix, active noise control, and the digital revolution Archived 2016-03-04 at the Wayback Machine for the description of an early commercial application of the TMS32010 for active noise control