19 августа 2019
«ЭрТэКа» — этот неологизм, обозначающий один из основных режимов работы спутникового геодезического оборудования, прочно прижился в среде геодезистов подобно многим терминам, ставшими нарицательными. Словечко происходит от неправильного «перевода» англоязычной аббревиатуры RTK (Real Time Kinematic), которая «в лоб» по-русски так и пишется — РТК («реал тайм кинематик»). На самом деле данный режим называется «кинематика в реальном времени» и русское сокращение должно бы быть таким – КРВ («КаЭрВэ»), а английская аббревиатура правильно читается как «АрТиКей»! Ну да ладно… Русский язык сейчас вообще стремительно «обогащается» новым сленгом…
Целью данной статьи является попытка разобраться в специфике данного режима работы GNSS-оборудования, геометрической сути такой методики, рассмотреть виды геодезических работ, где возможен и эффективен режим реального времени и какое оборудование для этого может понадобиться. Множество вопросов в службу технической поддержки на эти темы свидетельствует об актуальности такого «ликбеза», несмотря на весьма древнее происхождение методик реального времени в спутниковой геодезии. В связи с активным развитием в последние годы средств коммуникации и спутниковых сетей базовых станций роль режима реального времени многократно возросла, а в ряде работ стала полностью доминирующей.
Геометрическая и физическая сущность режима реального времени
Начнем, пардон, «от печки»… Как известно, одиночный спутниковый прибор любого класса в силу влияния большого количества негативных факторов высокую точность позиционирования не обеспечивает. Во всяком случае точность геодезического уровня. Поэтому при использовании в геодезических работах спутниковых приборов реализован разностный метод определения координат объектов, т.е. по взаимному положению двух точек. В каждой из них находятся приёмники, принимающие сигналы от спутников нескольких GNSS-систем. Один из них расположен на точке с известными координатами – он считается опорным (базовым). Другой, подвижный (ровер) перемещается по точкам, координаты которых требуется определить. В ходе обработки взаимное положение между такими точками может быть в значительной степени исправлено и, соответственно, существенно повышена точность координирования.
Существует два фундаментальных способа работы:
- с использованием постобработки и
- в режиме реального времени.
В первом случае все приемники работают автономно и никакой связи между собой не имеют. Важно только, чтобы регистрация измерений производилась одновременно, т.е. на определённом интервале времени выполнялся приём сигналов от одного и того же созвездия спутников. Записанные таким образом данные поступают на совместную обработку в специальное офисное программное обеспечение, которое решает две основные задачи:
- определение составляющих взаимного положения базовой и подвижной точки с максимально возможной точностью (компоненты вектора «база-ровер») и
- выполнение, так называемой, дифференциальной коррекции, понятие которой нам очень пригодится при обсуждении режима РТК.
Суть её заключается в присвоении исходной базовой точке известных координат в соответствующей системе отсчета и определении, по компонентам пространственного вектора, координат точки подвижной (определяемой) относительно вновь введённых истинных координат опорной точки.
Поскольку обсуждение подробностей данного режима выходит за рамки данной статьи отметим только, что это наименее оперативный, но и наиболее точный режим работы за счет возможности в течение долгого времени накапливать большие массивы измерений. Это позволяет в процессе обработки добиться максимальной компенсации погрешностей и получить точность координат на уровне миллиметров.
Данный режим, известный под названием «Статика» («Быстрая статика») используется при сгущении геодезических опорных сетей, развитии съёмочного обоснования, опорных базисов и других твердых пунктов. Этот же режим для съёмочных работ в более оперативном варианте называется «Стой-Иди» («Stop and Go») и тоже подразумевает постобработку в офисном ПО.
Во втором случае хоть и выполняются все те же действия: решение вектора между двумя приемниками и дифференциальная коррекция, но реализованы они совершенно иначе. Мало того, что вся обработка происходит в реальном времени, непосредственно в полевом компьютере (контроллере), между приемниками необходимо наличие надежного канала связи для обмена данными. Все настройки, управление съёмкой, обмен данными и регистрацию результатов обеспечивает полевое программное обеспечение, функционал и удобство которого во многом определяют успех оборудования у пользователей. Варианты способов коммуникации между приемниками и необходимое для этого оборудование мы рассмотрим в следующих разделах.
Поскольку данный режим позволяет оперативно, непосредственно на объекте работ получать готовые координаты точек, то он преимущественно используется для съёмочных работ и для выноса в натуру (разбивки) точек и называется «Кинематикой в реальном времени» или RTK.
Как же это работает?
При запуске съёмки на опорном (базовом) приёмнике в полевом ПО необходимо указать точные известные координаты для данной точки в соответствии с ранее назначенной проекту системой отсчета (системой координат). В последующем ПО имеет возможность сравнить текущее приближённое решение с известными значениями и сформировать разности координат для базовой точки. Эти разности в народе именуют «поправками», которые базовый приёмник и отправляет на подвижный (ровер) по тому или иному каналу связи. На самом деле в составе корректирующей информации кроме «поправок» передаётся гораздо больше данных, вплоть до параметров системы координат, но сейчас на этом заострять внимание не будем.
Подвижный приёмник, работая недалеко от базовой станции (до нескольких десятков километров), находится приблизительно в равных с базой условиях приёма спутниковых сигналов и имеет близкий к ней уровень погрешностей определения координат. Таким образом ПО контроллера, находящегося на подвижном приёмнике, приняв корректирующую информацию от базы имеет возможность исправить результаты своей работы в реальном масштабе времени.
Если в проекте полевого контроллера верно произведена настройка системы координат и на объекте обеспечен надёжный канал доставки корректирующей информации, то можно сказать, что ровер выдает сразу готовые точные координаты. Это позволяет выполнять как оперативные съёмочные работы, так и вынос в натуру (разбивку) различных объектов.
Важно отметить, что наличие одного лишь сервиса предоставления корректирующей информации от базовой станции без привязки к местным исходным пунктам геодезической сети и правильной настройки рабочей системы координат не может обеспечить высокоточное абсолютное позиционирование.
Вопросы использования проекций, настройки в контроллере систем координат, в том числе условных локальных, а также применения процедуры калибровки (локализации) района работ заслуживают рассмотрения в отдельной статье.
Каналы связи для режима RTK
Теперь о связи. Сам по себе режим RTK никак не зависит именно от способа коммуникации. Важно, чтобы связь была стабильна на необходимом расстоянии от базового приёмника до ровера. На современном этапе можно выделить четыре категории средств доставки «поправок» к подвижному приёмнику:
- радиоканалы в УКВ-диапазоне;
- сети мобильной связи GSM/GPRS с голосовыми каналами или посредством выхода в Интернет;
- новомодные WiFi, дальнобойный Bluetooth и т.п.;
- глобальный сервис, использующий спутниковый L-диапазон или Интернет.
В зависимости от условий и специфики работ выбирается тот или иной вариант или их комбинация. Соответственно имеется широкий выбор оборудования в дополнение к основному комплекту приёмник-контроллер.
Кстати о комплектах. В зависимости от используемой технологии комплект может включать от двух и более спутниковых приёмников, включая базовый, плюс оборудование для связи. И наоборот, в связи с бурным развитием сетей опорных базовых станций, комплект может состоять из компактного ровера-моноблока с полевым ПО в смартфоне или даже одно комбинированное устройство в конструктиве наладонного накопителя…
Использование УКВ (UHF) диапазона
Исторически раньше всего на службе RTK использовались радиомодемы УКВ-диапазона. Корнями этот способ связи уходит в береговые сервисы для морской навигации и до сих пор незаменим в регионах, не обеспеченных надежным покрытием сотовой связи. В настоящее время используются устройства, работающие в основном в диапазоне частот 400-470 МГц с мощностью передачи от 0.5 до 30-40 Вт.
Приёмник может иметь встроенный в свой корпус маломощный радиомодуль и компактную УКВ-антенну. В зависимости от условий распространения радиосигнала на объекте дальность обслуживания может составлять от сотен метров до нескольких километров.
Мощные радиомодемы – это отдельные устройства с радиаторами охлаждения и самостоятельными аккумуляторными блоками питания. В комплект таких модемов входят антенны различных габаритов и конструкций, устройства для их установки, кабели различной длины, сечения и назначения, а также вспомогательные аксессуары. На равнинной открытой местности мощные радиомодемы обеспечивают дальность обслуживания до нескольких десятков километров.
Практически все радиомодемы умеют работать в режиме ретранслятора (репитера), что позволяет дополнительно расширить зону обслуживания RTK, а также обеспечить работу на территории со сложным рельефом или при наличии препятствий.
Использование голосовой связи GSM
Бурное развитие сетей сотовой связи позволило кардинально расширить возможности спутникового оборудования в режиме RTK. Дальность взаимодействия стала регламентироваться лишь охватом территории сотовыми сетями и методическими ограничениями спутниковых технологий. Габариты оборудования связи ужались до размеров смартфонов и гнезд для SIM-карт. Поскольку для взаимодействия спутниковых приборов используются голосовые каналы сотовой связи работа тарифицируется как обычный разговор двух абонентов, а на тарифе необходима соответствующая услуга пакетной передачи данных. Для настройки связи достаточно роверу указать мобильный номер базы, что не в пример проще, чем согласовать целый ряд настроек для УКВ-модемов.
Использование Интернет соединения (GPRS)
Следующим шагом стало развитие Интернет-технологий связи. У базовых приемников появилась возможность вещать корректирующую информацию в сеть Интернет. А для подвижных приёмников стал доступен многопользовательский доступ к этим данным. В отличие от GSM-связи «точка-точка» протокол NTRIP предоставляет множеству пользователей индивидуальные идентификаторы и пароли для безопасного RTK-подключения к источнику «поправок» в сети Интернет.
Выход в Сеть обеспечивается посредством всё тех же SIM-карт сотовых операторов, а малый трафик и доступные тарифы гарантируют меньшие затраты на связь в геодезическом производстве.
Возможность организации взаимодействия между базовыми приёмниками позволила развивать сетевые RTK-технологии, объединяя базовые станции в пределах целых регионов. Это позволило обеспечить высокоточными геодезическими измерениями большие территории с однородной системой отсчета.
Сети базовых станций. Технология VRS
О сетях постоянно действующих базовых станций (ПДБС) стоит поговорить отдельно. Если такая сеть присутствует в регионе предстоящих работ, то это мощный инструмент для использования технологий RTK. Кроме этого базовые станции по умолчанию регистрируют «сырые» GNSS-данные и всегда могут быть использованы при постобработке собственных статических измерений пользователей спутниковой геодезической аппаратуры. Базовые станции (БС) – это комплекты спутниковых приёмников модульной конструкции, стационарно расположенные на охраняемых объектах, например, офисных зданиях, где им обеспечены хорошие условия обзора небосвода и стабильный выход в сеть Интернет. Проект сети (места установки одиночных базовых станций) разрабатывается заранее с соблюдением геометрических требований к ее конфигурации. Кроме обеспечения коммуникационных возможностей базовая станция должна быть оснащена специальным сетевым программным обеспечением.
Являясь одним из компонентов разностного спутникового решения стационарная базовая станция позволяет пользователю, имея лишь одиночный комплект GNSS-приёмника (сетевой ровер), успешно выполнять широкий спектр высокоточных геодезических работ на расстояниях в десятки километров от неё.
Однако, имеется важный нюанс… Сама по себе одиночная базовая станция, передавая корректирующую информацию, обеспечивает лишь одну составляющую RTK-технологии – точное позиционирование ровера относительно точки установки антенны БС. Если эта точка изначально не привязана относительно местной опорной сети геодезических пунктов в соответствующей системе координат, то и координаты ровера данной системе отсчета соответствовать не будут.
Базовые станции будучи объединены в сеть позволяют максимально гибко использовать возможности RTK, обслуживая роверы на минимальном их удалении от баз. Венцом сетевых возможностей является технология VRS – виртуальных базовых станций. Станции сети объединены каналами связи и управляются из единого центра. Специальное сетевое программное обеспечение на основе данных приёмников сети может смоделировать результаты измерений в любом месте территории, охваченной сетью, и сформировать поток «поправок» от данной точки. Ровер, передав сведения о своём местоположении, получает решение от смоделированной рядом виртуальной БС. Это гарантирует высокую точность работы в любом месте сети.
Глобальные и облачные сервисы
Ну и наконец несколько слов о глобальных сетевых решениях для обеспечения режима RTK.
Глобальный дифференциальный сервис известен давно и основан на расчетах не по фазе несущей спутникового сигнала, а по коду. Точность позиционирования не высока – от полуметра до полутора метров. Называется такой режим – DGPS. Это уже не грубый навигатор, но и до геодезического уровня еще далеко. Тем не менее такой точности достаточно не только для решения навигационных задач, но и, например, для сбора данных об объектах местности для ГИС. Корректирующая информация передается по тому же спутниковому каналу в L-диапазоне, а формируется она на основе данных глобальной (общемировой) сети базовых станций.
Современная реализация глобального дифференциального сервиса позволяет получить субдециметровую точность координат одиночным роверным приёмником если имеется подписка на данную услугу. Примером такой службы является Trimble CenterPoint RTX. «Поправки» могут передаваться как по спутниковому каналу, так и через Интернет. В течении получаса инициализации точность позиционирования сходится к 4 см и даже лучше в любом месте зоны покрытия данного сервиса.
«Вишенкой на торте» глобальной RTK-технологии стала система Trimble Catalyst. Это пример, так называемой, концепции «Позиционирование как услуга». Комплект включает компактную недорогую спутниковую антенну и устройство на ОС Android с ПО. Несколько вариантов подписки на глобальный сервис обеспечивают различные уровни точности в зависимости от задач – от метровой до сантиметровой.
Особняком стоит технология RTK-съёмки с использованием облачных сервисов, как глобальных, так и локальных. В любом случае «облака» реализуются на распределенных в сети Интернет серверах. Такой функционал имеется и в современных моделях приёмников, рекомендуемых для базовых станций. Это некая программа диспетчер — посредник, обеспечивающий каналы связи между базовыми и подвижными приёмниками, имеющими подключение к сети Интернет. Базовый приёмник, расположенный на опорной точке, вещает поток «поправок» в облако, а подвижные приёмники их оттуда забирают.
Примером облачной глобальной службы является Spectra Precision Central. При наличии активной лицензионной поддержки ПО контроллера можно зарегистрироваться на сервере службы и получить доступ к облачному сервису для приёмников Spectra Geospatial.
В заключении
Итак, мы рассмотрели основные аспекты теоретических основ и аппаратной реализации такого современного и эффективного метода спутниковых геодезических измерений как Кинематика реального времени (RTK). Развитие современных средств коммуникации позволило значительно расширить его возможности и обеспечить геодезические работы гибким и высокоточным инструментарием.
Для получения подробной информации по всему спектру геодезического оборудования обращайтесь к менеджерам и службе технической поддержки компании «Геодезия и Строительство».
Что такое RTK съемка?
RTK (Real-Time Kinematic — кинематика в реальном времени) — метод съемки, при котором делается запрос, чтобы мобильный приемник практически мгновенно определял координаты своего текущего местоположения с сантиметровой точностью.
Используются два приемника: один (база) устанавливается на выбранном пункте, в то время как другой (ровер) используется для съемки.
База будет либо:
- пользовательская собственная база с UHF радиомодемом, или GSM модемом или другим внешним устройством для передачи поправок.
- принадлежащая третьему лицу, управляющему базой или сетью базовых станций (соединение происходит с помощью NTRIP протокола), и предоставляющему данные роверу через GSM/GPRS модем.
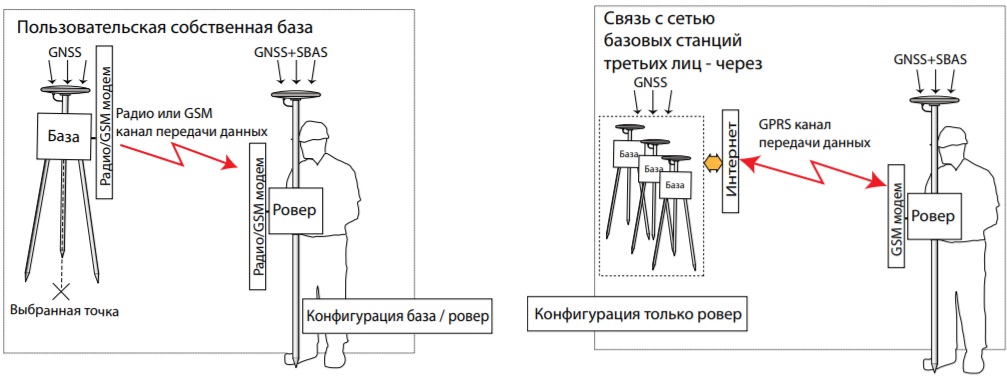
Для передачи RTK поправок базового приемника (базы) к роверу должен быть установлен канал передачи данных.
Передача данных может быть осуществлена несколькими способами:
– UHF радио
– сотовый модем (GSM, GPRS или CDMA)
– другие внешние устройства (такие как Wi-Fi и др.).
Успешная съемка требует инициализации системы и сохранения инициализации в течение всей съемки.
Может быть несколько одновременно работающих роверов, причем каждый получает данные RTK поправок от той же самой базы.
Как осуществляется съемка точек?
Определение и регистрация координат пунктов осуществляется в выбранной системе координат.
Ключевые моменты
• Перед началом работы необходимо удостовериться, что ровер получает RTK положение (инициализация должна быть достигнута и поддерживаться).
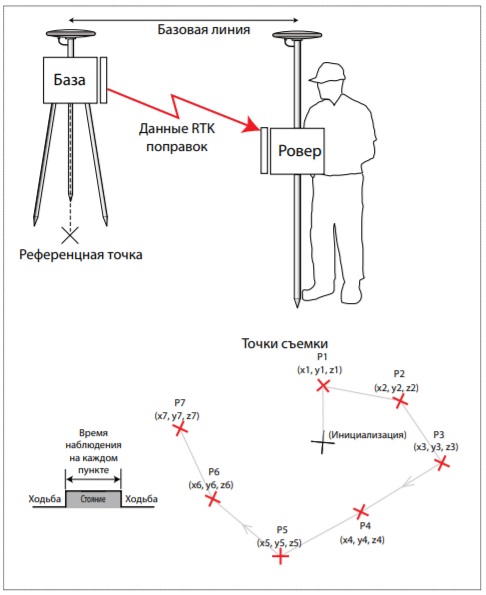
• Антенную вешку необходимо удерживать вертикально на каждом пункте съемки (если не используется приемник с компенсацией наклона).
• Время съемки на каждом пункте устанавливается пользователем (количество эпох).
• В течение отсчета эпох ровер усредняет последовательные положения, которые он вычисляет.
• При количестве эпох = 1 ровер регистрирует только первое положение, которое он вычисляет на этом пункте (нет усредненного положения).
Что такое автоматическая съемка по времени или интервалу?
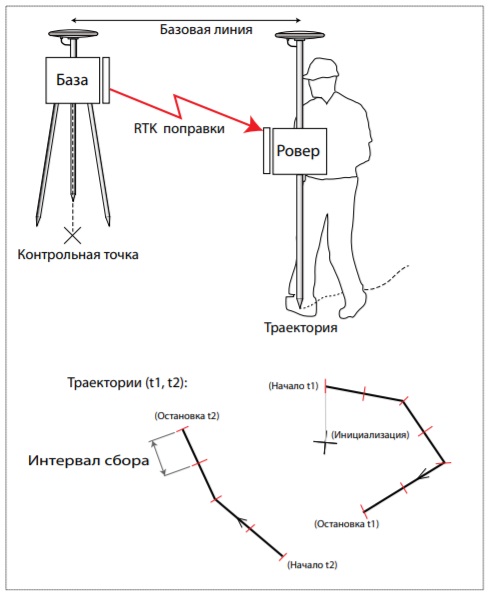
• Антенную вешку необходимо удерживать вертикально во время движения по всей траектории.
• Пункты автоматически регистрируются с равномерным интервалом по времени или по расстоянию. Перед началом съемки необходимо установить интервал
регистрации.
• Так как съемка осуществляется вдоль траектории, то все регистрируемые пункты будут обязательно “единожды снятыми“ точками, то есть первое решение положения, доступное во время регистрации точки, будет сохранено (в этом случае никакое усреднение положения не возможно).
Как осуществляется вынос точек в натуру?
Направляясь в поле для поиска точного расположения точек, необходимо маркировать их соответствующим образом и затем регистрировать их положения с помощью ровера.
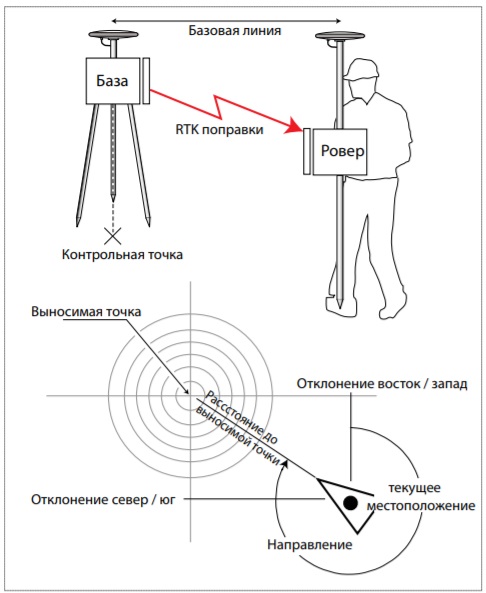
• Выберите нужную точку из списка точек, предварительно загрузив список в полевой контроллер. После выбора точки экран контроллера будет вести к выносимой точке.
• Удерживайте антенную вешку вертикально, поскольку система ведет к точке. Система сообщит, когда антенна приемника окажется над точкой.
• Когда антенна приемника окажется над точкой, закрепите ее положение на земле. Можно сохранить координаты выносимой точки.
Что такое съемка с постобработкой?
При съемке с постобработкой полевое оборудование используется только для записи GNSS сырых данных, которые программное обеспечение постобработки сможет обсчитать для получения положения с сантиметровой точностью.
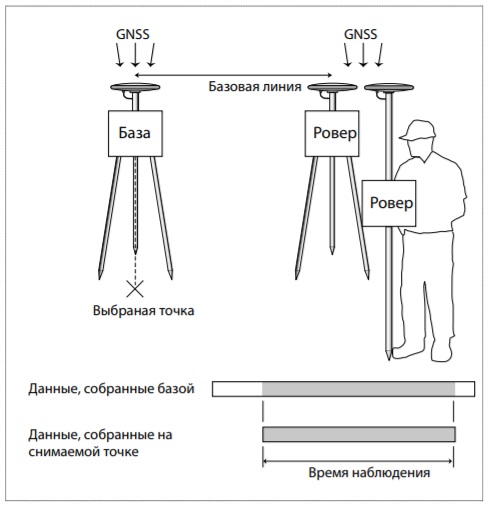
1.Используются две системы: одна (база) устанавливается на выбранном пункте, в то время как другая (ровер) используется для съемки. Базой может быть либо собственная база пользователя, тогда база должна быть расположена должным образом, или база, управляемая третьим лицом.
Для требуемого для постобработки времени наблюдений данные от базы третьих лиц могут быть получены через Интернет (CORS, RGP). Данные мобильного приемника могут быть также подгружены к данным базы (OPUS), обеспечивая вычисление положения с сантиметровой точностью.
2. Данные должны быть собраны одновременно базой и ровером. Всегда используйте одну и ту же частоту записи сырых данных на обоих приемниках.
3. Успешная съемка требует надлежащей инициализации системы. Поддерживать инициализацию на всем протяжении съемки нужно всегда, особенно надо быть осторожным при кинематических съемках, чтобы не “закрыть видимость” GNSS антенне ровера.
4. Время наблюдений определяется установкой (стартом) последнего устройства и выключением (окончанием работы) первого устройства. Желательно сначала начать наблюдения на базе и выключить ее последней.
5. Требуемое время наблюдений главным образом зависит от длины базовой линии, условий приема и метода используемой инициализации.
6. Помните, ровер всегда будет собирать данные непрерывно на всем протяжении съемки, выполняется ли статическая, непрерывная кинематическая или кинематическая Stop & Go съемки. Именно поэтому необходимо непрерывно держать GNSS антенну, так чтобы она не была закрыта никакими преградами.
7. В одно и тоже время можно осуществлять сбор данных несколькими роверами.
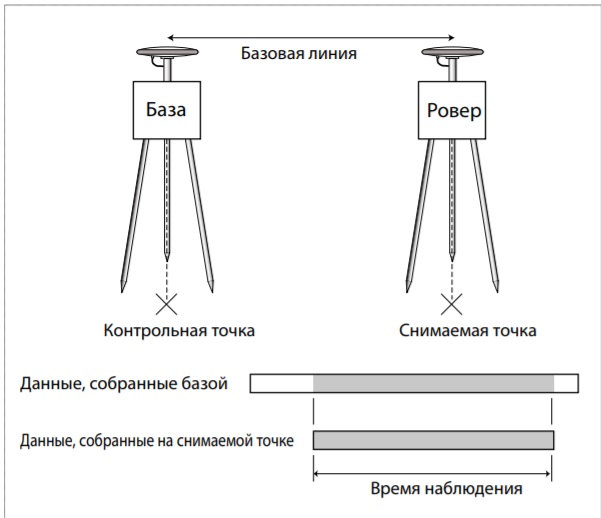
Статическая съемка
Ключевые моменты
1. Та же самая установка системы и для базы, и для ровера.
2. Ровер неподвижен на всем протяжении съемки.
3. Время съемки равно времени наблюдений.
4. Проблемы инициализации и “закрытия“ антенны препятствиями минимизированы, так как ровер неподвижен.
Кинематическая съемка Stop & Go
Съемка нескольких точек в пределах относительно небольшой области
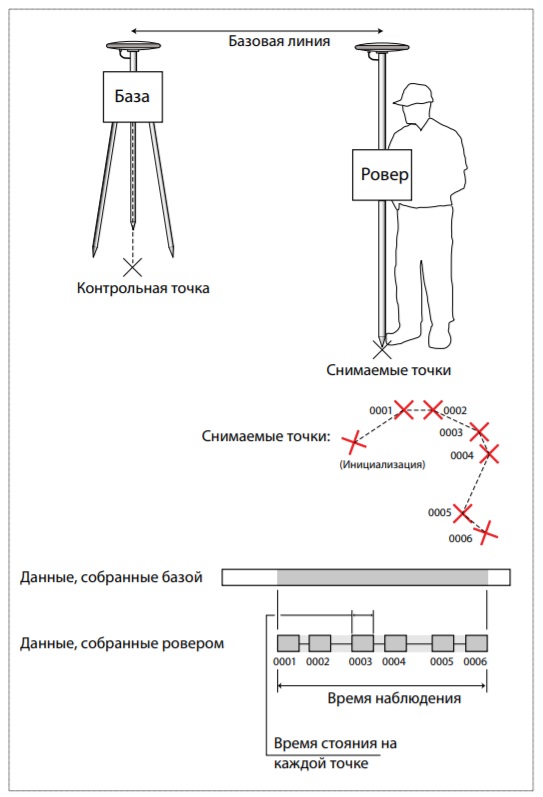
1. Ровер перемещается последовательно, становясь на каждой из снимаемых точек. Антенная вешка ровера должна сохранять вертикальность на каждом пункте съемки в течение заданного времени съемки.
2. Пользователь заранее устанавливает время съемки на каждой снимаемой точке. Окончание отсчета в обратном направлении сообщит, когда надо начать двигаться на следующую точку.
3. Съемка точки в режиме Stop & Go (Стой и иди) с помощью ровера просто состоит из вставки метки начала и конца в регистрируемый сырой файл данных.
4. Точки автоматически именуются (цифровой суффикс автоматически увеличивается), если для каждой точки не присваивается специальное имя.
5. Время съемки фактически определяет период времени, для которого программное обеспечение постобработки будет усреднять последовательные положения, определяемые в течение этого периода времени.
Как выбрать местоположение базового приемника?
Правильный выбор местоположение базы очень важен для успешной съемки. При выполнении постобработки или съемки в режиме реального времени одно- или двухчастотными приемниками необходимо помнить, что положение ровера будет всегда вычисляться относительно положения базы. Любая погрешность определения положения базы будет неизбежно передана положению, вычисленному ровером.
Основных критерии, которые необходимо принимать во внимание при установке базы:
1. условия GNSS приема
2. положение базы известно или неизвестно?
Когда используется радиомодем базы, имеется третий критерий, который может быть принят во внимание при выборе местоположения базы: радиоантенна должна быть установлена настолько высоко, насколько это возможно (с минимумом преград для работы, так, чтобы дальность действия могла быть столь же хорошей, как ожидалось).
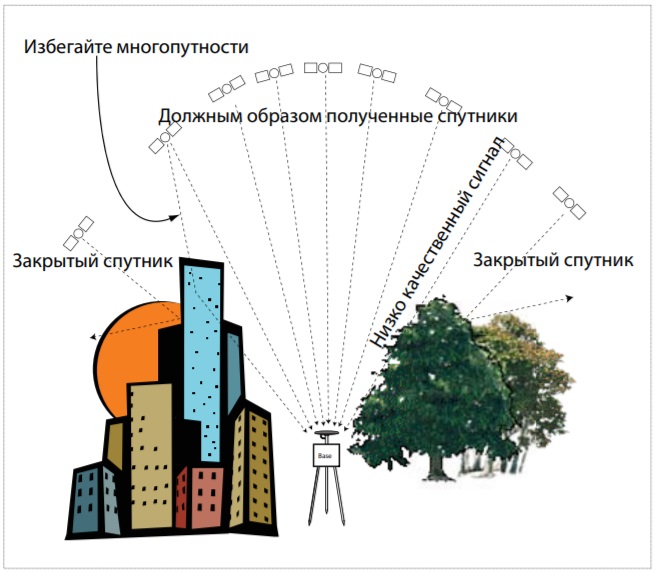
Первый критерий: условия GNSS приема
Удостоверьтесь, что антенна базы расположена в свободном от препятствий месте, дающем наилучший из возможных обзоров неба. По возможности избегайте рядом стоящих деревьев, зданий или любых высоких препятствий около базы. Наличие чистой видимости неба позволит базе собирать данные от максимального числа видимых спутников, что надежно гарантирует успешное, точное и быстрое выполнение съемки.
Необходимо обратить внимание на сигналы от низко расположенных спутников, закрытых деревьями, они могут иметь более неблагоприятное влияние на работу системы, чем те сигналы, которые полностью были перекрыты.
Второй критерий: положение базы известно или неизвестно?
Помимо хороших условий приема, необходимых базе, нужно также принять во внимание, что положение базы может быть известно с большой или меньшей точностью. Пояснения ниже помогут понять, что именно необходимо знать о точности положения базы.
1. Если необходимо получить абсолютное положение с сантиметровой точностью, в специальной системе координат для всех отснятых пунктов, то положение базы должно быть известно с той же самой сантиметровой точностью. Если выбранное положение базы неизвестно, то принимая во внимание, что для этого пункта в используемой системе координат нужна сантиметровая точность, то можно определить это положение статической съемкой с постобработкой. Однако необходимо знать координаты известного пункта, чтобы определить эту точку.
2.Если необходимо выполнить только относительные измерения (то есть найти взаимное положение одних точек относительно других), то база может быть установлена на неизвестном пункте, отвечающем требованию приема сигналов. В этом случае, положение, которое будет введено в базу, должно быть известно только с точностью в пределах нескольких метров.
Предостережение! Нужно иметь в виду, что в этом случае точки невозможно привязать к известной системе координат, если позже одна из этих точек точно не будет определена в нужной системе координат. При использовании полевого программного обеспечения можно также использовать функцию Локализация, чтобы привязать съемку к местной системе координат. Имеются некоторые неудобства, о которых необходимо
знать при установке базы на неизвестном пункте. Для каждых 15 метров ошибки между полученными и истинными координатами базы, одна миллионная (ppm) относительной ошибки будет учтена при вычислении вектора между базой и ровером, плюс абсолютная разность между вычисленным и реальным положениями базы. Например, координаты, принятые для пункта базы, отличаются на 30 метров от истинного положения базы.
Это 30-метровое различие от истинных координат приведет к 2 ppm (0.002 м на километр) ошибки в векторе между базой и ровером. Если ровер расположен на расстоянии 5 километров от базы, то это приведет к ошибке в векторе равной 0.010 м. В большинстве случаев, базовый приемник определяет положение лучше чем 30 метров (как правило ближе к 10-20 метрам), но возможна и ошибка в 50 метров. Если планируется использовать приблизительно подсчитанное положение для базы, то используйте короткие вектора между базой и ровером, гарантирующие, что добавляемая ошибка для выполняемой съемки будет не существенна.
Что такое инициализация?
Инициализация — процесс, с помощью которого приемник в реальном времени (или программное обеспечение постобработки) может решить неоднозначность целого числа, свойственную обработке фазы несущей. Решение неоднозначности целого числа — необходимое условие для приемника (или программного обеспечения) для получения положения с сантиметровой точностью. По этой причине, выполнение инициализации — это требование, которое нужно постоянно иметь в виду.
ПРИМЕЧАНИЕ: Не путайте этот инициализационный процесс с инициализацией GNSS приемника, в соответствии с последовательностью запуска которого приемник ищет видимые спутники для вычисления первого положения с 5-10-метровой точностью.
Важность длины базовой линии
Количество данных, требуемых для инициализации процесса вычисления положения в программном обеспечении (при постобработке) или ровера (в режиме реального времени — RTK), пропорционально длине базовой линии. Другими словами, чем длиннее базовая линия, тем большее время требуется для достижения инициализации.
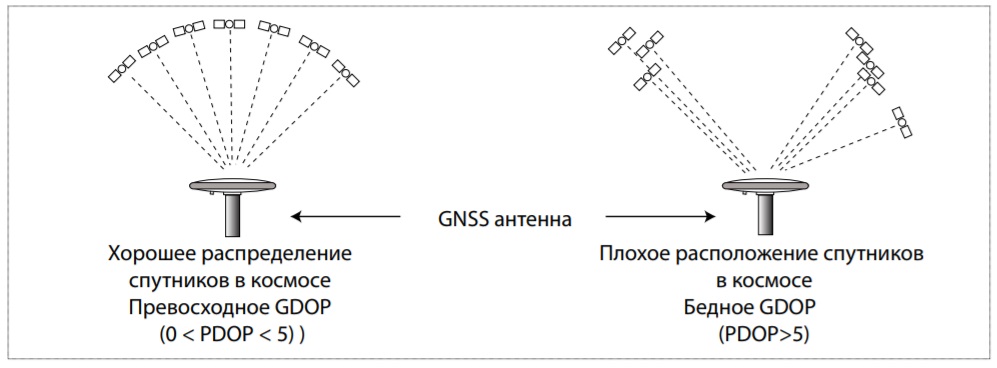
Что такое PDOP и тд ?
DOP (Dilution of Precision — снижение точности): Фактор, вычисляемый оборудованием, для описания расположения спутников в космосе. Чем более низкое значение DOP, тем лучшее расположение спутников и лучшая вероятность успешности съемки. Существуют несколько критериев DOP: GDOP, HDOP, VDOP, TDOP. Но, наиболее часто используемый — PDOP (критерий снижение точности позиционирования).
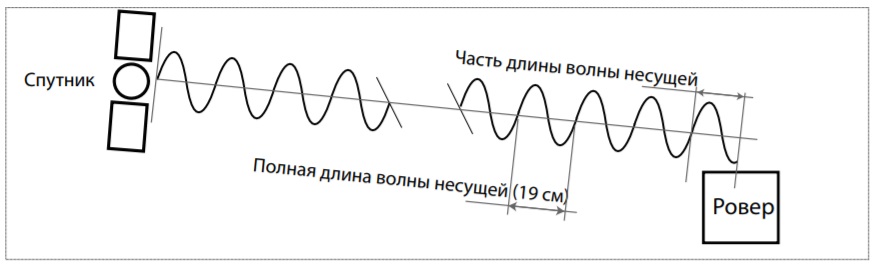
неоднозначность целого числа: Термин “Целое число” относится к числу полных длин волны несущего сигнала, укладываемых в расстояние, отделяющее спутник от приемника. “Неоднозначность” относится к факту, что это число является неизвестным в начале съемки. Поэтому, решение неоднозначности целого числа означает определение точного числа полных длин волны.
RTK и постобработка
При съемках в реальном времени инициализация системы считается достигнутой, когда система получила фиксированное RTK решение для любого нового положения, которое она вычисляет. Нужно всегда быть уверенным, что этот статус инициализации поддерживается до конца съемки. Поэтому, это весьма естественно, что в режиме RTK необходимо быть уверенным, что процесс инициализации был успешен. Если теряется статус RTK положения, то подразумевается, что система потеряла инициализацию и ее необходимо восстановить.
В съемках с постобработкой имеется та же самая потребность в инициализации, за исключением того, что в реальном времени система не всегда способна сообщить, что это требование выполнено. Помните, что при этом методе съемки, система — только сборщик сырых данных. Только впоследствии, возвратившись назад в офис для осуществления постобработки сырых данных, анализируя полный набор результатов собранных данных можно увидеть была ли успешной инициализация.
Кинематика против статики
При статических съемках риск неудачной инициализации значительно уменьшается, если GNSS антенна остается неподвижной и система используется для относительно длинных сессий записи с наилучшим возможным обзором неба. Но это не подходит для кинематических съемок, в течение
которых ровер перемещается с места на место, с реальными рисками:
• попадания GNSS антенны в «тень», приводящее к потере
захвата спутников.
• остановка записи сессий прежде, чем достаточное число данных было собрано для гарантирования инициализации.
Именно по этой причине нужно знать проблему инициализации и так осуществлять все необходимые шаги, чтобы удостовериться, что инициализация не только достигнута, но также будет сохранена до конца кинематической съемки.
Одночастотные против двухчастотных приемников
Двухчастотным GNSS приемникам требуется меньшее количество данных и меньше времени для инициализации. Однако недавние достижения позволили одночастотным приемникам значительно улучшить их работу на определяемом пункте и также уменьшить различие, отделяющее их от двухчастотных.
Что такое фазовый центр?
Фазовый центр — это виртуальная точка, которая представляет начало пространственно-временных координат антенны. Она находится обычно внутри антенны и часто на вертикальной оси антенны или близко к ней. Местоположение фазового центра точно определено изготовителем антенны после длительного ряда испытаний. Его положение обычно указывается непосредственно на антенне.
Почему высота GNSS антенны настолько важна?
Базовое измерение позволяет получить с сантиметровой точностью вектор между фазовыми центрами базовой и роверной антенн. Обычно всех интересует реальное положение снимаемой марки (или другого наземного пункта) над которым была установлена антенна, а не положение фазового центра антенны.
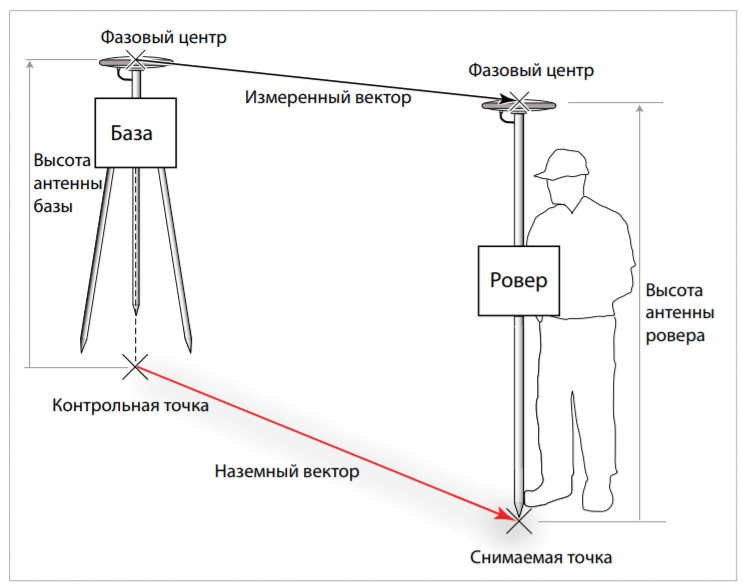
Чтобы вычислить положение наземного пункта, а не антенны, необходимо задать роверу параметры для выполнения редукции антенны. Для выполнения редукции антенны при вычислении положения в расчете учитывается высота антенны ровера. Для определения правильных положений снимаемых точек на поверхности земли в систему нужно ввести высоты как базовой так и роверной антенн, не зависимо от того, выполняется ли RTK съемка, или съемка с постобработкой.
Существует два различных способа измерения высоты антенны:
• Измерение наклонной высоты
• Измерение вертикальной высоты
Что такое наклонная высота и как измерить?
Наклонное измерение, как правило, выполняется на базе (обычно в направлении от антенны до наземного пункта), так как выполнение классического вертикального измерения не возможно по причине наличия аксессуаров (штатива, трегера и т.п.). Вместо выполнения неточного вертикального измерения можно прибегнуть к наклонному измерению, которое выполняется гораздо точнее (в том случае, если параметры антенны также точно известны) с помощью специальной рулетки, используемой для этой цели.
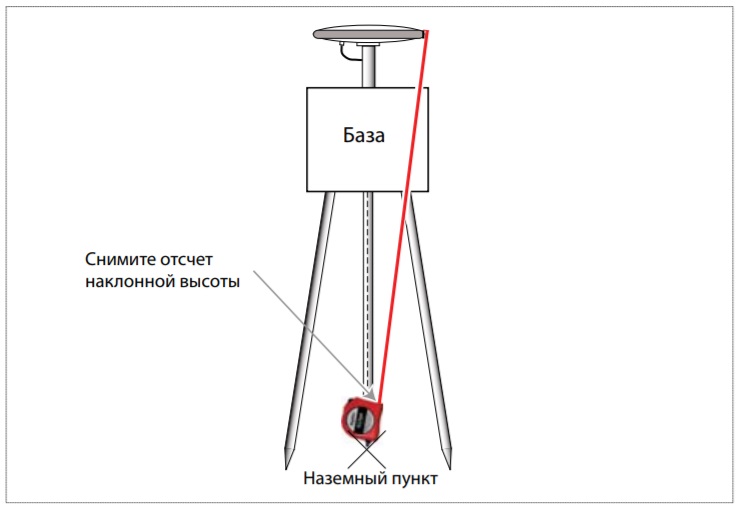
Установите базовую антенну точно над наземным пунктом.
• Вставьте конец рулетки в слот для выполнения измерения наклонной высоты.
• Разверните рулетку в направлении наземного пункта и поместите наконечник измерительной ленты в наземный пункт.
• Заблокируйте ленту и снимите отсчет, указанный на измерительной ленте: этот отсчет является наклонной высотой.
• ведите это значение в базовую систему как наклонное измерение.
Что такое вертикальная высота и как измерить?
Это более простой метод для измерения высоты антенны. Он в основном используется для мобильных приемников (роверов). Вертикальная высота представляет собой расстояние от низа GNSS антенны до поверхности земли
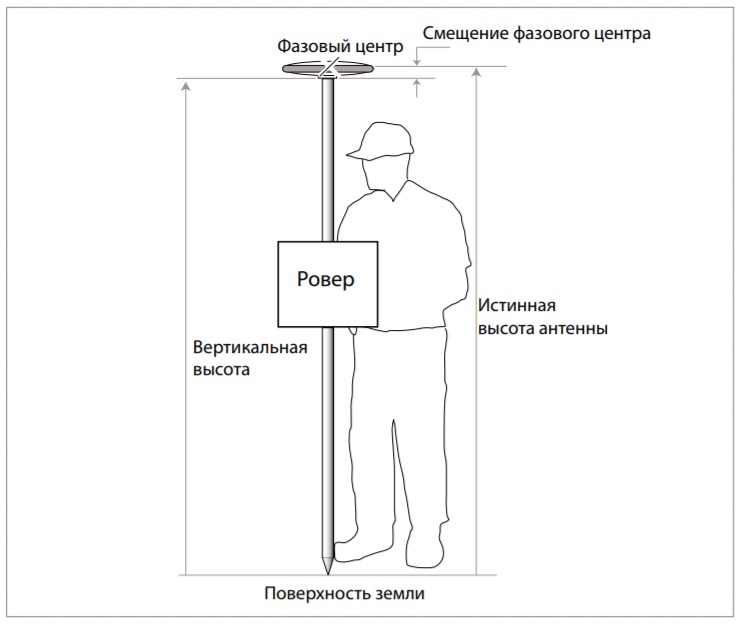
Реальная высота антенны равна сумме вертикальной высоты антенны и смещения фазового центра. Измерение вертикальной высоты состоит только в измерении длины вешки (штанги), используемой для удерживания GNSS антенны (или моноблочного роверного приемника). У большинства вешек высота регулируется и они имеют градацию для установки нужной высоты, поэтому измерение вертикальной высоты состоит только в снятии отсчета на
градационной шкале вешки.
От чего в основном зависит точность GNSS геодезического приемника?
При выполнении точной съемки точность прежде всего зависит от способности системы определять самую хорошую вариацию в части несущей длины волны, пришедшей в пункт съемки, в предположении, что число полных циклов несущей было определено успешно. Известно, что длина волны несущей, используемой в обработке сигнала L1, равна 19 см, а это дает возможность системе при пошаговой обработке достигнуть сантиметровой точности.
Во-первых, на практике точность будет зависеть от следующих параметров:
• Качества измерений фазы несущей, т.е. качества приема (уровень помех) и внешних условий (числа видимых спутников, присутствия или отсутствия многопутности).
• Внутреннего качества используемых обрабатывающих алгоритмов.
Точность также будет зависеть от данных RTK коррекций, полученных от базы:
• Более длинное расстояние между снимаемым пунктом и базой приводит к более высокой теоретической неопределенности, воздействующей на результат позиционирования.
• На результат позиционирования воздействуют более низкий уровень приема принимаемых данных RTK коррекций, вовлеченные в обработку шумовые данные и более высокая неопределенность измерений. Точность будет также зависеть от того, выполняется ли съемка в реальном времени (RTK) или в постобработке. В постобработке система обрабатывает собранные сырые данные с лучшей точностью, чем в реальном времени, при условии, что время наблюдения достаточно длительное.
Что значит Хсм + Y ppm в описании точности приемника?
Для всех точных геодезических систем компании Magellan, выражение глобальной точности положения равно сумма постоянного и переменного членов, как приведено в уравнении ниже:
Точность = Хсм + Y ppm
Где:
• X — постоянная составляющая (выраженная в сантиметрах), указывающая глобальную неопределенность измерения положения (о среднеквадратическом значении величины смотрите Точность измерений на странице 117). X определяет внутреннее качество приемника и его алгоритмов при номинальных условиях приема сигналов (т.е. открытое небо, минимальное число видимых спутников и хороший GDOP). Это значение может отличаться для вертикальных и горизонтальных компонентов положения.
• Y – переменная часть, выраженная в миллионных долях (ppm) длины базовой линии. Например, если Y=1 и длина базовой линии вашей съемки составляет около 8 км, то Y дополнительно и номинально добавляет 8 миллиметров неопределенности во все положения. Значение Y также отражает качество приемника и используемых алгоритмов. Подобно X, значение Y может отличаться для вертикальных и горизонтальных компонентов положения.
Следует обратить внимание, что обычные оценки точности для фиксированных RTK положений даются в нижеприведенной таблице для условий номинального приема (открытое небо, хороший GDOP, 5 — 7 видимых спутников). Но не забывайте, что эти значения специфические для каждой модели. Для получения более конкретной информации, пожалуйста, смотрите таблицу спецификаций используемой модели. Очевидно, что оценки точности ухудшаются, когда системе не удается получить фиксированное положение.
Точность измерений. Что такое rms?
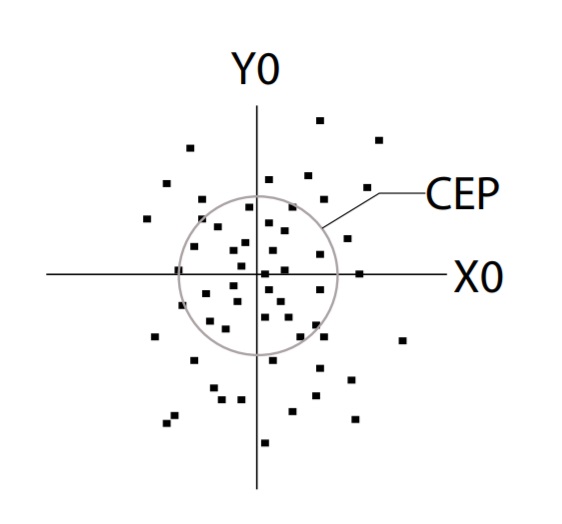
Ошибки в координатах, определенных с помощью GNSS систем, не постоянны (решение изменяется статистически). Если нанести горизонтальные координаты контрольной точки (X0, Y0), вычисленные GNSS системой в течение значительного периода времени (статическая съемка), то будет получен чертеж разброса, подобный показанному ниже.
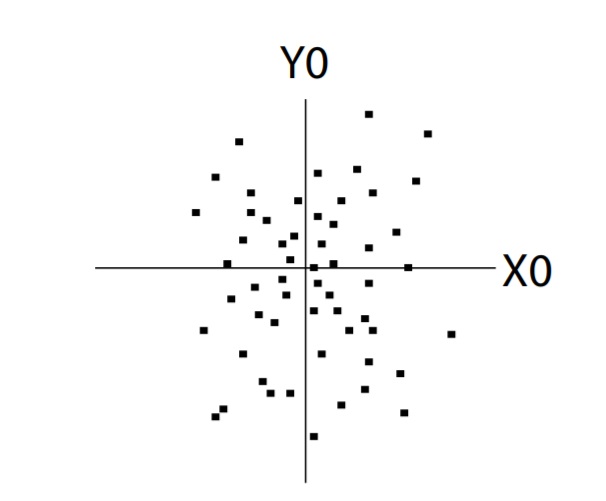
Начало координат в осях системы (X0, Y0) — истинное положение контрольной точки. Каждая точка представляет собой решение положения, полученное GNSS системой для этого пункта. Анализируя разброс решений, можно видеть, что точность определения координат различная. Главные критерии точности измерений, используемые GNSS производителем, следующие:
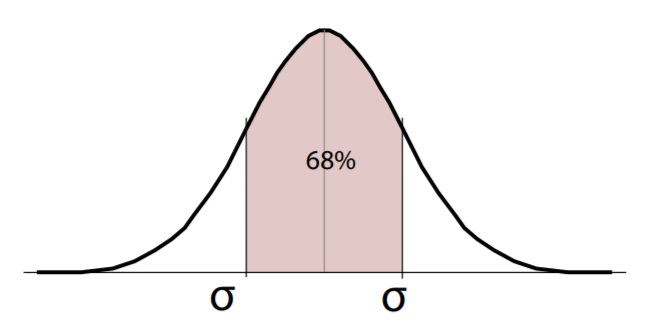
1. rms (root mean square — среднеквадратическое значение): точность получается вычислением квадратного корня из суммы квадратов отклонений, деленной на число слагаемых (статистический метод). Если распределение ошибки вдоль каждой оси является распределением Гаусса (это в общем случае), т.е. наименьшая ошибка стремится к нулю (или близка к нулю), тогда вероятность ошибки может быть ассоциирована со среднеквадратической точностью. Эта вероятность составляет около 68%, означая, что вычисленное положение будет в пределах анонсированной точности в 68 случаях из 100 во времени. Этот процент соответствует доверительному интервалу σ на кривой Гаусса.
2. Некоторые производители используют меру “2drms”, которая выведена из среднеквадратической меры для горизонтальной плоскости, используя следующую формулу:
Точность (2drms) = 2 х Точность (rms)
3. CEP (Circular Error Probable — вероятная круговая ошибка): точность равная радиусу круга с центром в истинном положении, в котором содержится 50% точек на графике разброса в горизонтальной плоскости (смотрите график ниже). Это означает, что вычисленное положение будет в пределах анонсированной точности 50% по времени.
Эллипсоидальная высота и превышение
Определение вертикальной координаты с помощью GNSS систем требует пояснения. За этой координатой фактически лежит специфика GNSS систем, сравнимая с традиционными системами для съемки.
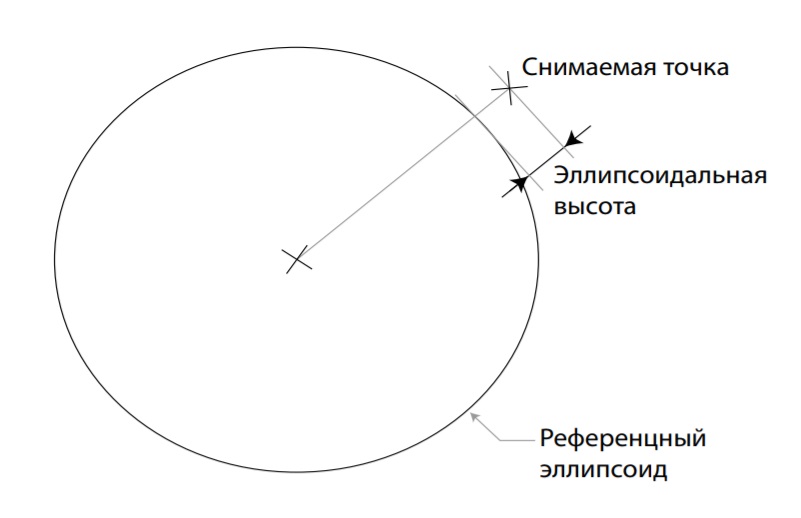
В основном, все положения, получаемые GNSS системами соответствуют географическим координатам (широте, долготе и высоте), относящимся к референцному эллипсоиду, который является простой и точной моделью для описания формы и поверхности нашей планеты. Референцный эллипсоид ссылается на WGS84, или лучше на ITRFхх, где хх есть год реализации ITRF (ITRF00 был реализован в 2000 году). Центр этого референцного эллипсоида совпадает с центром массы Земли, который также является началом координат прямоугольной геоцентрической системы координат ECEF (Earth-Centered Earth-Fixed) — системой декартовых координат X, Y, Z. Поскольку плановые координаты являются связанными, то референцный эллипсоид дает полную
достоверность. Преобразование географических координат в любую проекционную систему не создает никаких особых проблем.
Все намного усложняется, когда имеем дело с вертикальными координатами, так как геодезистам нужно определить очень точно, какой вид вертикальных координат они желают измерять. Вертикальная координата, получаемая GNSS системами, по существу есть высота снимаемого пункта над референцным эллипсоидом, называемая эллипсоидальной высотой.
Долгое время для измерения превышения пунктов геодезисты использовали понятие “средний уровень моря”. Средний уровень моря был общепринятым
“нулевым” превышением. Но это понятие имело некоторые ограничения.
Сегодня используется гораздо более лучшая модель вертикальной референцной системы, называемая геоидом. Эта модель определяется как поверхность, на которой гравитация постоянна.

Эта поверхность является нерегулярной, зависящей от плотности и распределения материалов на поверхности Земли, означая, что геоид не точно следует естественным особенностям земной поверхности. (Геоид — воображаемая поверхность, которую нельзя увидеть).
На практике модель геоида, используемая в GNSS системе, это файл, содержащий более или менее плотный массив точек, равномерно распределенных от края до края поверхности геоида. Для каждой точки файл обеспечивает плановые географические координаты и высоту (геоидальную высоту) между референцным эллипсоидом и геоидом. Протяженность файла геоида может быть всемирной или ограниченной отдельной областью.
Файл геоида, обеспечивающий точное моделирование неровности поверхности геоида, используется GNSS системой для интерполирования высоты между этой поверхностью и поверхностью референцного эллипсоида для снимаемых точек.
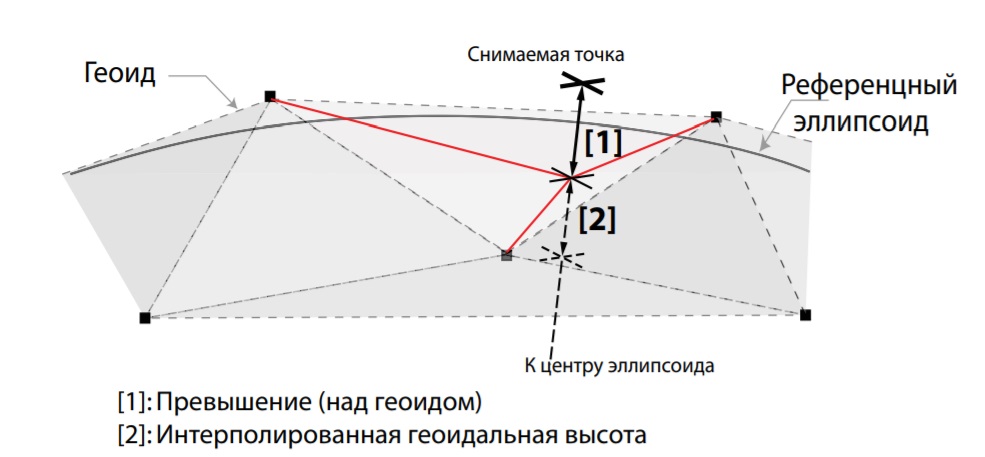
Из этой интерполяции система может получить превышение от эллипсоидальной высоты, используя следующую формулу:
Превышение [1] = Эллипсоидальная высота – Интерполированная геоидальная высота.
Что такое локализация?
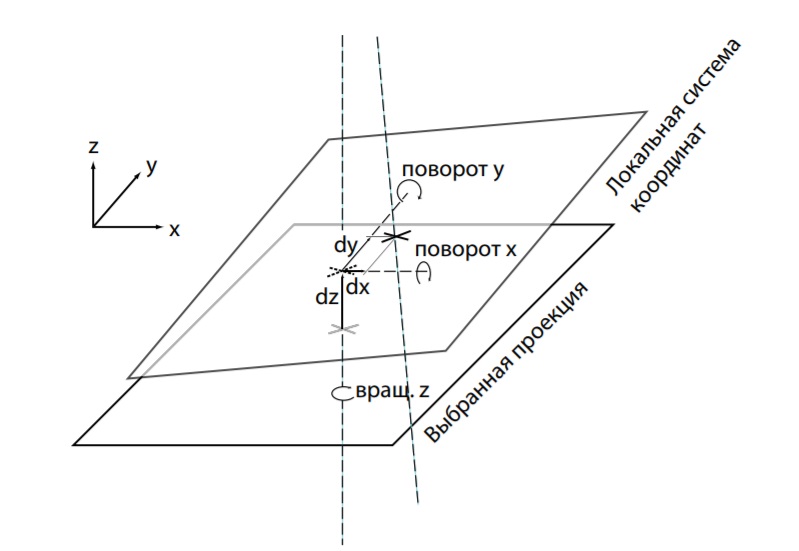
Термин локализация (установление местонахождения), также известен как “калибровка” или “определение локальной системы координат”, точно соответствующей определяемой местной системе координат, в которой выполняется съемка. Процесс локализации выполняет поворот и смещение
плоскости для определенной проекционной системы, выбранной для работы. После выполнения локализации, оборудование вычисляет координаты каждого пункта, в том числе новые снимаемые точки в этой местной системе координат. Обычно с помощью локализации ваше оборудование определяет новую локальную систему координат (плоскую), сравнивая известные локальные координаты одной или нескольких референцных точек с соответствующими географическими координатами, введенными или измеренными для этих точек.
Когда необходима локализация (калибровка)?
Выполнение локализации требуется в следующих случаях:
• Работа требует использования данной стандартной проекции, но понятно, что оборудование не предоставит точно ожидаемых координат при размещении над существующими контрольными точками.
• Работа требует, чтобы была использована локальная проекция, но ни один из параметров этой проекции не известен.
• База работает на контрольной точке, чье положение было только что определено в автономном GPS режиме.
Методы локализации
Существуют несколько методов локализации. Выбор метода зависит от природы решаемой проблемы и количества доступных контрольных точек. Обычно используются нижеприведенные методы локализации:
• Плоское подобие: В этом методе, пользователь должен иметь три или больше контрольных точек, среди которых как минимум две должны находиться в горизонтальной плоскости. Для определения локальной системы координат выполняется преобразование методом наименьших квадратов. Преобразование включает поворот и параллельный перенос определенной используемой стандартной проекционной системы, в том числе и изменение масштабного коэффициента. Для достижения точной локализации на горизонтальной плоскости настоятельно рекомендуется использование не менее трех контрольных точек. Для гарантирования вертикальной локализации это число нужно поднять до четырех или больше.
• Жесткое тело: Такой же как и метод плоского подобия, за исключением того, что масштабный коэффициент удерживается фиксированным в процессе локализации.
• Преобразование Гельмерта: С помощью этого метода, пользователь обеспечивает семь параметров, легко изменяющих проекционную систему, используемую в работе. Эти параметры (dX, dY, dZ, поворот X, поворот Y, поворот Z и масштабный коэффициент) могут быть результатом многоточечной локализации, выполненной раньше.
• Одноточечный дирекционный угол: Этот метод используется для определения локальной системы координат, когда доступна только одна контрольная точка. В этом случае, пользователь должен точно определить ориентацию на Север (географический или истинный) локальной системы координат. Типичное приложение этого метода — использование пункта, в котором база устанавливается в начале координат (0, 0, 0) или на единственном пункте (например, 100, 1000, 0) локальной системы координат. В этом случае географическиекоординаты положения базы могут обеспечить только субметровую точность, когда геодезист заинтересован в сборе только локальных координат для работы. Поэтому геодезист должен убедиться, что географические координаты базы (обычно определяемые автономным GPS методом) могут быть получены в процессе локализации. В процесс локализации может быть включена модель геоида. В данном случае, все превышения, подготовленные для используемых контрольных точек, должны быть ортометрическими вместо эллипсоидальных.
Типовые рекомендации для завершения процесса локализации
Локализация, основанная на использовании контрольных точек, обычно достигается следующими шагами:
1. Убедитесь, что для работы выбрана правильная проекционная система. Что это означает? Существует два случая для рассмотрения:
• Некоторые контрольные точки, которые фиксируются горизонтальными или вертикальными в процессе локализации, могут иметь свои координаты, выраженные в известной проекционной системе. Рекомендуется выбрать эту проекцию как начальную проекционную систему работы.
• Если локальные координаты контрольных точек не ссылаются на любую известную проекционную систему, рекомендуется выбрать проекционную систему, которая является стандартной в районе съемки.
2. Введите локальные координаты первой контрольной точки.
3. Введите или снимите с помощью приемника широту, долготу и эллипсоидальную высоту первой контрольной точки.
4. Установите горизонтальный или/и вертикальный контроль для первой контрольной точки. Под этим подразумевается требование, что локальная система координат проходит, соответственно, через горизонтальное или/и вертикальное положение точки.
5. Повторяйте предыдущие три шага до тех пор, пока все контрольные точки не будут определены.
6. По завершению процесса локализации, убедитесь, что локальная система координат уже является новой проекционной системой, используемой в работе
Канал передачи данных при RTK съемке
В геодезической RTK системе канал передачи данных используется для передачи RTK поправок (поправок) от базы к роверу. Канал может быть одним из следующих двух типов:
• Автономный: пользователь имеет полный контроль над формированиеми передачей RTK поправок (оборудование используется в конфигурации базы/ровера).
• Сетевой: пользователь должен обратиться к третьей стороне, сетевому провайдеру для получения RTK поправок (оборудование используется только в конфигурации ровера)
В этом разделе представлены два основных способа передачи данных, доступных в геодезических системах :
• Радио (автономный)
• Мобильные коммуникации.
Ключевые термины и выражения
Возраст поправок: Возраст поправок равен промежутку времени, протекающему между временем поправок, генерируемых на базе, и временем, когда они фактически используются для получения RTK координат в ровере. В общем говоря, качество поправок уменьшается с увеличением их возраста.
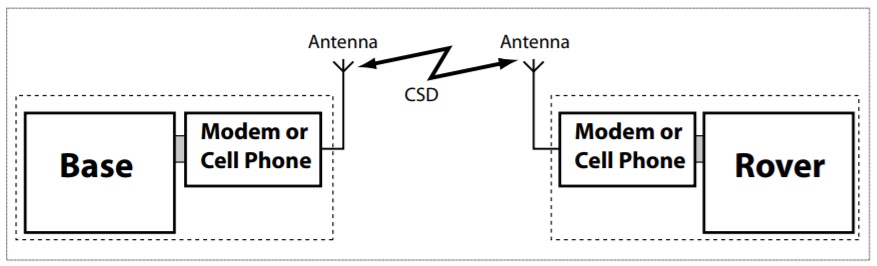
CSD (Circuit Switched Data — технология передачи данных для мобильных телефонов). Оригинальная форма передачи данных, развиваемая для TDMA (Time Division Multiple Access — множественный доступ с разделением по времени), базирующаяся на телефонных мобильных системах, подобных GSM.
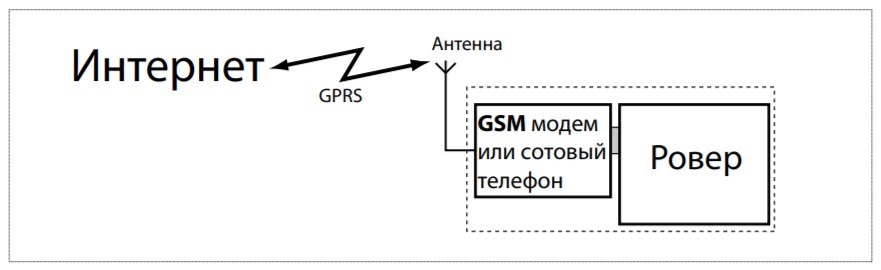
GPRS (General Packet Radio Service — пакетная радиосвязь общего пользования): Сервис мобильных данных, доступный пользователям GSM модемов (например, сотового телефона). Передача GPRS данных обычно оплачивается за мегабайт переданных/полученных данных, а передача данных через традиционное CSD подключение оплачивается за время соединения поминутно (независимо от того, передал пользователь данные или нет).
NTRIP (Networked Transport of RTCM via Internet Protocol — сетевая передача RTCM поправок посредством Интернет протокола): Протокол, используемый GNSS сервисом провайдеров, служит для передачи поправок от сетей референцных станций (баз). Среди хорошо известных используемых NTRIP протоколов: VRS, MAC, FKP и т.п
Использование радиомодемов
Радиомодемы могут быть использованы только в системах, имеющих базо-роверные конфигурации. Неограниченное число приемников могут получать RTK данные от одной и той же базы, хотя обычно они работают попарно (один на базе, в качестве передатчика, и другой на ровере, в качестве приемника).
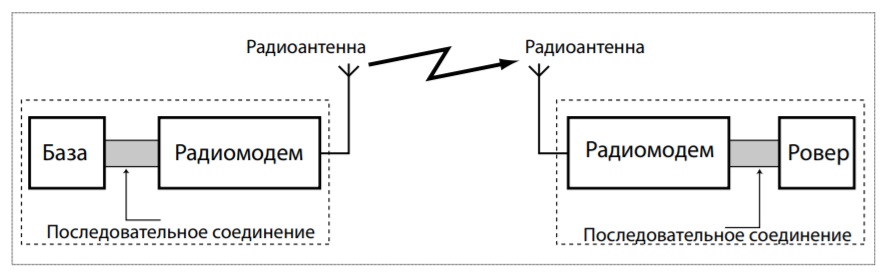
Внутренний и внешний радиомодемы
В зависимости от модели используемого приемника, радиомодем может быть:
• внутренний встроенный — модем соединяется с системой через последовательный порт (снаружи приемника видна только радиоантенна).
• внешним — модем подсоединяется к приемнику с помощью кабеля питания/передачи данных.
Требующие и не требующие лицензирования радиомодемы
Почти во всех странах использование радиосистем регулируется законодательством. В основном, правила касаются мощности передатчика, частотного диапазона и ширины полосы используемого канала. Они отличаются в разных странах. Во многих странах радиомодемы, используемые ниже определенного уровня излучаемой мощности и в пределах частотного диапазона, не требуют сертификации (или лицензирования) для использования.
Производители предлагают два вида радиомодемов:
• не требующие лицензирования, маломощные радиомодемы (коротковолнового диапазона).
• требующие лицензирования, радиомодемы средней мощности (длинноволнового диапазона). Получение права на работу с радиомодемом остается обязанностью пользователя.
Особенности
Главные особенности радиомодемов следующие:
• Полоса УВЧ (UHF) частот: УВЧ диапазон, в котором радиомодем передает или получает данные (не требующие лицензирования радиомодемы действуют в полосе 850-930 МГц, другие радиомодемы в полосе 410-470 МГц).
• Мощность излучения: мощность передающего базового радиомодема (в Вт).
• Скорость передачи данных: Скорость, с которой несущая частота модулируется RTK данными поправок (в Кбит/с).
Не перепутайте со скоростью передачи данных (в бодах) последовательного порта, соединяющего радиомодем с приемником.
С радиомодемом нет необходимости в любом третьем поставщике данных. База может сама генерировать и передавать RTK данные поправок через радиомодем. Этовозможно в любое время и в любом месте. Кроме того, несколько роверов может работать в режиме RTK от одной и
той же базы (режим multi-point). Однако, распространение волн в УВЧ диапазоне иногда затруднено. Радиодиапазон может быть уменьшен, если
существуют помехи между базой и ровером. Как правило, радиоантенну нужно устанавливать на максимально возможной высоте.
Коммуникации сотовой связи
GSM модемы могут использоваться для канала передачи данных в одной из следующих двух конфигураций:
• Пара GSM модемов могут работать в режиме CSD. Один используется на базе, а второй — на ровере. Канал передачи данных действует подобно телефонной связи, при этом ровер дозванивается. Эта конфигурация хорошо подходит для геодезических систем, используемых в базовой или роверной конфигурации.
Один модем (или сотовый телефон) работает в режиме GPRS. Модем используется на ровере, чтобы установить связь через Интернет, прямой IP адрес или режим NTRIP. Затем ровер начинает получать RTK данные поправок от выбранной базы. Этот тип канала передачи данных
хорошо подходит для геодезических систем, используемых только в роверной конфигурации.
Активация канала передачи данных в режиме NTRIP
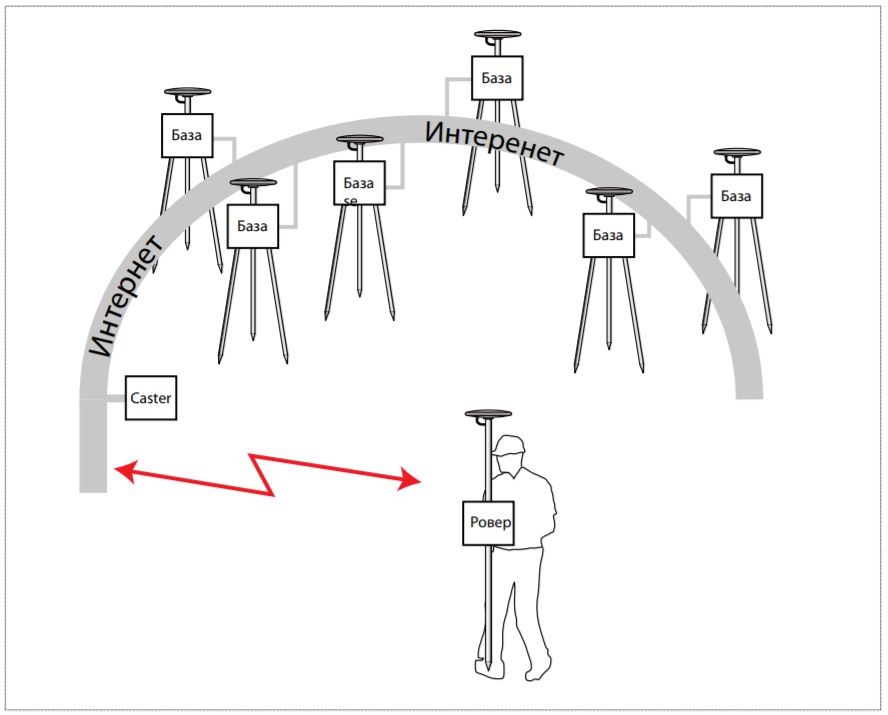
В этом режиме необходимо:
• Ввести следующие пять идентификационных параметров для Caster (сервера):
1. IP адрес
2.Имя точки доступа
3. Номер порта
4.Логин
5. Пароль
• Caster обратится к исходной таблице, из которой можно выбрать базу, с которой будет работать ровер.
Контроль канала передачи данных. Что такое задержка/возраст поправки?
Для успешного выполнения полевых работ большое значение имеет уверенность, что канал передачи данных функционирует постоянно. Хороший показатель для контроля канала передачи данных — это возраст поправок. Этот параметр выводится на экран контроллера.
Когда канал передачи данных работает нормально, возраст поправок постоянно равен скорости передачи данных RTK поправок на базе. Если передача данных поправок не производится, или ровер не в состоянии их декодировать и использовать, то возраст поправок будет увеличиваться.
Если увеличение возраста поправок временное, то необходимо контролировать только канал передачи данных (пока ровер продолжает вычислять координаты при фиксированном решении). Но если возраст поправок продолжает увеличиваться, то это может привести к потере статуса фиксированного решения на ровере для всех вычисляемых координат. В этом случае, необходимо выяснить причину некорректной работы канала передачи данных и принять необходимые меры для устранения неисправностей.
Принимая во внимание все выше сказанное, рекомендуется следующее — при выполнении полевых работ постоянно следить за возрастом поправок.
Планирование крупномасштабной статической съемки с постобработкой
Планирование крупномасштабной статической съемки состоит из двух основных шагов:
• Проект сети
• Схема наблюдений
Проект сети
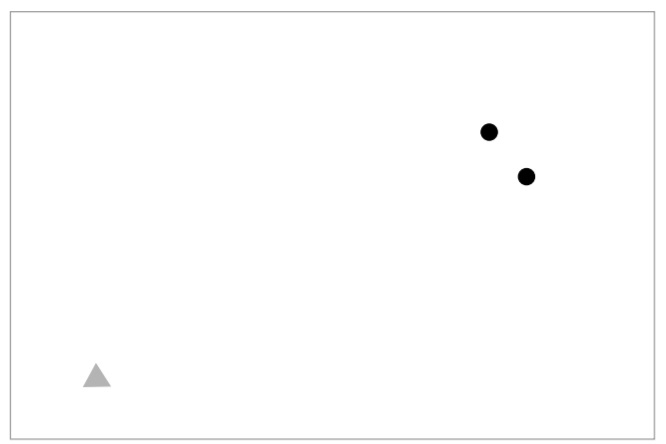
Независимо от числа (2 или более) контрольных точек, которые будут заложены для статической съемки, необходимо запроектировать сеть в зависимости от количества и расположения наблюдаемых пунктов, необходимых для эффективного позиционирования новых точек. Для иллюстрации рассмотрим пример, где должны быть заложены две новых взаимновидимых точки на площадке строительного объекта для их использования в качестве обоснования (смотрите Рис. 1).
Рис. 1. Пример контрольной съемки с 3 точками
Если требуется выполнить эту съемку обычным тахеометром, то необходимо проложить замкнутый теодолитный ход от существующего контрольного пункта до двух новых точек (смотрите Рис. 2). Тот же самый подход может использоваться и для GNSS съемок. На приведенном ниже рисунке показан проект сети для этого случая
Рис. 2. Проект замкнутого теодолитного хода
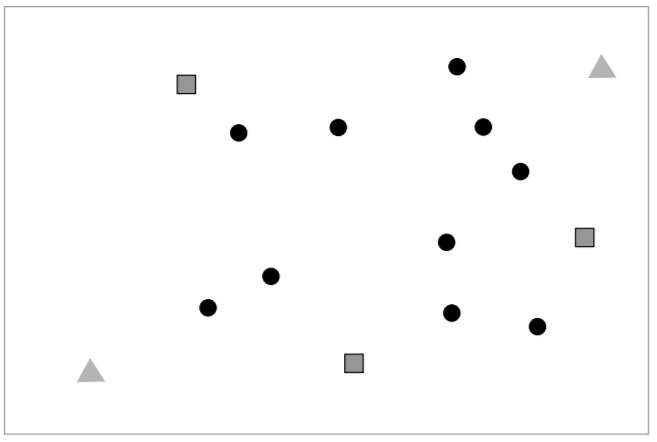
Предыдущий пример привел к очень простому проекту сети. На Рис. 3 представлена более комплексная контрольная съемка, где должны быть заложены 10 новых пунктов, основанных на двух плановых и трех существующих высотных контрольных пунктах.
Рис. 3. Пример контрольной съемки с 15 точками
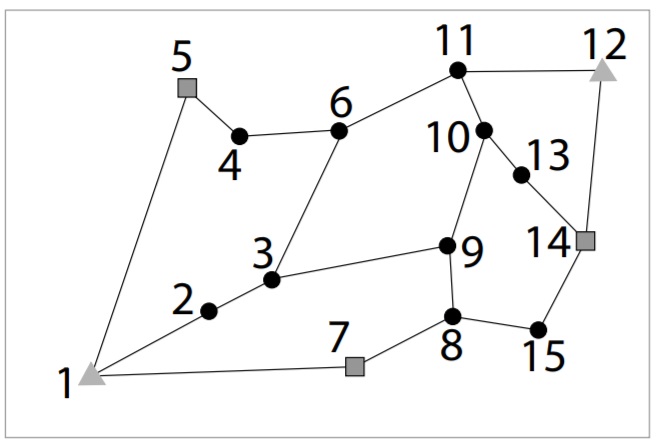
Опять же, если выполнять эту съемку обычным тахеометром, то необходимо запроектировать такую схему теодолитного хода, которая представляет собой ясно видимую сеть замкнутых ходов, проходящих через снимаемые точки. На Рис. 4 показан один из возможных проектов сети.
Рис.4. Проект сети для контрольной съемки с 15 точками
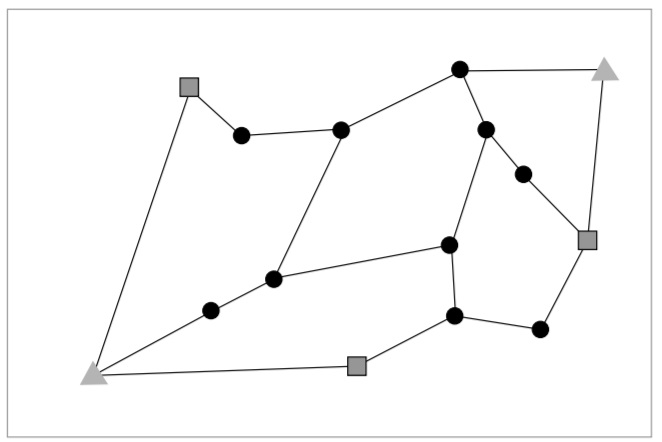
Хотя этот проект сети был создан обычным проложением теодолитного хода (в уме), тот же самый проект может также использоваться при выполнении съемки GNSS оборудованием.
При проектировании сети придерживайтесь следующих правил:
Проектируемые замкнутые полигоны должны проходить через точки сети и должны быть похожи на квадрат или круг. Избегайте длинных и узких замкнутых контуров. Полигоны в форме круга или квадрата являются более жесткими геометрически.
• Число точек в каждом полигоне должно быть менее 10.
• Всегда включайте в полигон взаимовидимые точки, которые могут использоваться как пара исходных точек для ориентирования обычного хода. Так как в большинстве случаев взаимовидимые точки относительно близки друг к другу, важно выполнить прямое наблюдение между ними.
Схема наблюдений
По окончанию создания проекта сети необходимо определить, каким образом и когда будет выполнен сбор данных для создания желаемой сети.
Как организовать сбор данных
Если бы использовался обычный тахеометр для выполнения нашего примера контрольной съемки с 3 точками, то проложенный ход, был бы похож на ход из Рис. 5.
Рис.5. Замкнутый теодолитный ход контрольной съемки с 3 точками
Количество сторон теодолитного хода, требуемых для соединения каждой точки в сеть, будет зависеть от условий на участке земли между точками.
Хорошо, если район съемки является относительно плоским и есть прямое направление от существующего контрольного пункта до двух новых закладываемых точек, тем самым, минимизируется число требуемых сторон хода для замыкания полигона.
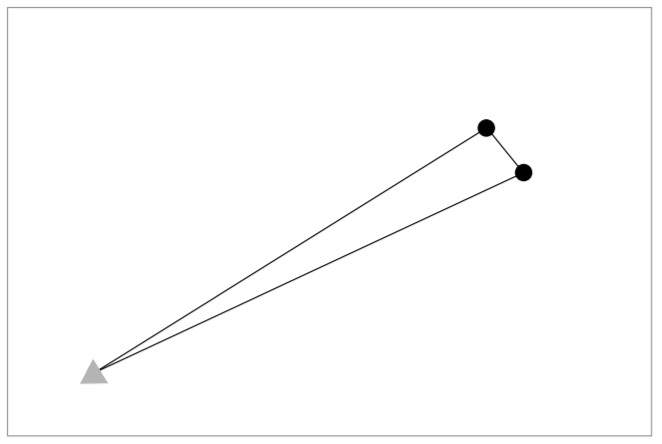
GNSS съемка имеет преимущество ввиду отсутствия требования прямой видимости между точками съемки. Это позволяет произвести прямые наблюдения между точками. Чтобы пояснять это, возьмем наш проект сети для контрольной съемки с 3 точками (смотрите Рис. 6).
Рис. 6. Проект сети для контрольной съемким с 3 точками
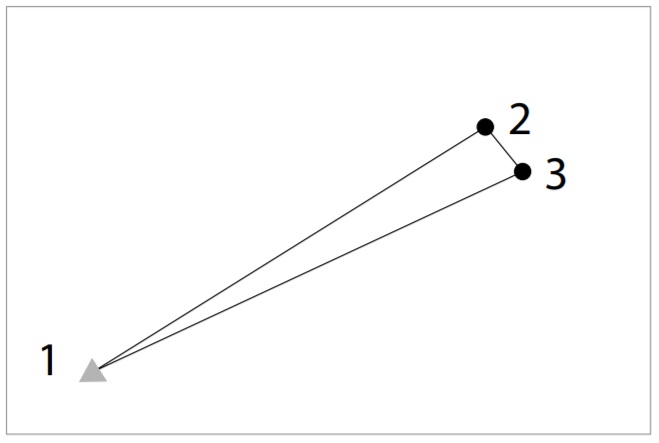
Предположим, что для выполнения вышеупомянутой съемки будет использоваться система из двух приемников. Для создания связи между существующим контрольным пунктом 1 и новой точкой 2 поместите один приемник на точке 1, а другой — на точке 2 и одновременно соберите данные. После завершения наблюдения переместите приемник с точки 2 на точку 3. Выполните еще одно наблюдение, одновременно собирая данные на точках 1 и 3. После завершения наблюдения переместите приемник с точки 1 на точку 2. Выполните завершающее наблюдение на точках 3 и 2. Когда эти данные будут загружены и обработаны, будет получено три вектора (приращения координат), формирующих проект сети (смотрите Рис. 6).
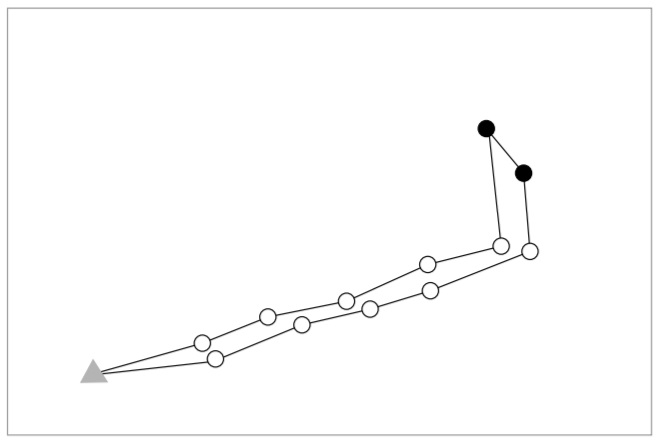
Теперь рассмотрим ситуацию, где используется система из трех приемников. При помещении приемников на три точки сети, данные для всех трех векторов могут быть собраны в одном наблюдении, а не в трех отдельных наблюдениях (необходимых при использовании системы из двух приемников). Теперь рассмотрим схему наблюдений для более комплексной съемки с 15 точками (Рис. 7).
Рис.7. Проект сети для контрольной съемки с 15 точками
Для выполнения этого проекта сети необходимо осуществить прямые GNSS наблюдения между всеми непосредственно связанными точками. Каждая связь может рассматриваться как назначенный вектор. Подсчитывая связи в этом проекте сети, можно определить, что в этот проект сети должны входить 19 векторов. Если бы съемка выполнялась с использованием системы из двух приемников, были бы необходимы 19 отдельных сессий сбора данных (наблюдений). Например, можно начать съемку, поместив приемники на точках 1 и 2. После окончания этого наблюдения необходимо переместить приемник с точки 1 на точку 3 для выполнения наблюдений точек 2 и 3. И так далее, пока все векторы не будут определены.
Теперь рассмотрим ситуацию, где выше рассмотренная контрольная съемка с 15 точками должна быть выполнена с использованием системы из трех приемников. При съемке тремя приемниками каждая сессия наблюдений формирует два вектора из проекта сети. Например, можно начать съемку, размещая один приемник на точке 1, второй на точке 2, а третий на точке 7. Эти три приемника одновременно собрали бы данные на этих трех точках, что приведет к получению векторов между точками 1 и 2, а также точками 1 и 7. В дополнение к этим двум векторам будет получен третий
вектор между точками 2 и 7. После окончания первого наблюдения можно переместить один приемник с точки 2 на точку 9, а второй приемник с точки 1 на точку 8. Во время второго наблюдения приемник в точке 7 будет оставаться, при этом точка 7 используется как
объединительная точка при соединении первого и второго наблюдений. Такая процедура будет продолжаться до тех пор, пока все векторы не будут определены. На Рис. 8 показано, как могла бы выглядеть схема наблюдений системой из трех приемников.
Рис. 8. Схема наблюдений для контрольной съемки с 15 точкам
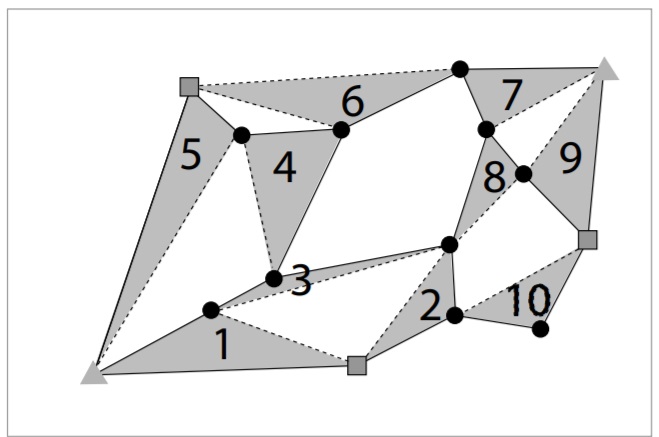
Анализ схемы наблюдений показывает, что для выполнения съемки, основанной на проекте сети (Рис. 4), будет требоваться 10 отдельных сессий наблюдений. Заметим, что во всех сессиях наблюдений, за исключением сессии 6, определяются два требуемых вектора проекта сети. Наблюдение 6 позволяет определить только один вектор, так как число заданных векторов (19) является нечетным.
Для дополнительной консультации обращайтесь к специалистам компании Aspect.
В настоящее время кинематическая спутниковая навигация (RTK) — это современная технология повышения точности данных, полученных в Глобальной навигационной спутниковой системе (GNSS) – GPS, ГЛОНАСС, GALILEO и COMPASS.
В настоящее время кинематическая спутниковая навигация (RTK) — это современная технология повышения точности данных, полученных в Глобальной навигационной спутниковой системе (GNSS) – GPS, ГЛОНАСС, GALILEO и COMPASS. Он обеспечивает более точное позиционирование и навигацию мобильного приемника, получающего скорректированные координаты в реальном времени от базовой станции.
Этот метод был обнаружен в середине 1990-х годов и постоянно разрабатывается для геодезии, мониторинга строительства, добычи полезных ископаемых и точного земледелия. Для сельского хозяйства крайне важно повысить точность в системах автоматического управления. RTK предоставляет эту возможность, поэтому RTK-инфраструктура, оборудование, аппаратные и программные решения работают во многих местах по всему миру, в том числе и в Украине.
Что такое RTK (Real Time Kinematic)
RTK — это набор способов и методов для значительного повышения точности географических координат до сантиметров, а иногда и до миллиметровой точности, полученных с использованием спутниковой навигационной системы GNSS. В последние годы эта технология становится все более распространенной в области точного земледелия. Это метод кинематического измерения, в котором два приемника GPS и / или ГЛОНАСС имеют радио- или сотовую линию связи через радиомодем или GSM-модем для передачи и приема данных между ними. Один приемник неподвижен с заданными координатами и называется опорным или базовым, а другой – подвижным.
В RTK используется двухчастотное оборудование. Передаваемые данные являются измерениями фазовой коррекции в реальном времени для мобильного приемника GNSS. Когда пара приемников находится примерно на одной высоте, предполагается, что атмосферные помехи одинаковы для обоих. На основе известных и измеренных координат опорный приемник вычисляет поправки к координатам и передает их на мобильное устройство. В последнее время в ряде стран, включая Украину, строятся постоянные станции и сети для RTK. Через них любой оператор, поддерживающий приемник GNSS, может воспользоваться услугами RTK в диапазоне базовых станций.

Зачем использовать RTK?
Радиосигналы, передаваемые спутниками, подвергаются различным нарушениям.
Существуют три основные причины изменения сигналов:
- Атмосферная неоднородность
- Шум от стационарных и движущихся объектов
- Прерывание сигналов
Спутники ГЛОНАСС, GPS, и в ближайшем будущем ГАЛИЛЕО и КОМПАС (БэйДоу) могут определять любое местоположение на поверхности Земли до миллиметра. Однако, когда сигнал достигает поверхности из-за искажения, он не указывает ни одной точки в несколько миллиметров, а пятна от 5 до 100 метров (в зависимости от широты, количества активных спутников и других условий). Деформации могут быть уменьшены за счет использования наземной инфраструктуры RTK с выделенными аппаратными и программными системами.
Инфраструктура представлена одной или сетью из нескольких базовых станций, обменивающихся потоками данных с использованием специализированного программного обеспечения. Спутниковый сигнал, принятый на станции, обрабатывается программным обеспечением, а затем базовая станция передает ремонт, очищая спутниковые сигналы. Исправленный сигнал, в свою очередь, переходит на технику на которой стоит приемник, от этого координаты становятся точны до сантиметров. Таким образом, RTK улучшает сигналы GPS и ГЛОНАСС для более высокой дифференцированной спутниковой навигации, что позволяет более эффективно управлять сельскохозяйственной техникой в точном сельском хозяйстве.
В последние годы RTK стал стандартом для точного земледелия, поскольку он позволяет осуществлять навигацию сельскохозяйственной техники с точностью до сантиметра. Таким образом, посадка, внесение удобрений, защита растений, сбор и другие операции осуществляются с автоматическим контролем с высокой точностью без упущения и перекрытия участков, с меньшей нагрузкой на оператора и более эффективным использованием ресурсов.

Преимущества и ограничения RTK
Основным преимуществом RTK-режима является способность точно обрабатывать сигналы в реальном времени. Существует несколько типов методов для получения навигационных исправлений, которые отличаются точностью и синхронизацией сигналов – кинематической, пост-обработка и дифференциальный метод в реальном времени (DGNSS). Метод пост-обработки позволяет осуществлять наиболее точную корректировку в миллиметрах, но для сбора и обработки данных требуется много времени. Дифференциальные методы могут работать в режиме реального времени, но точность поправок находится в пределах метра. При работе в режиме RTK вы можете получать настройки в реальном времени с точностью 1 см в горизонтальном и 2 см в вертикальном направлении. Это самый высокий уровень точности в реальном времени.
С появлением спутниковых приемников, которые работают не только с GPS, но и с ГЛОНАСС, а затем с GALILEO и COMPASS, ожидается значительное повышение точности, эффективности и надежности измерения пространственных координат. Последние модели приемников компактны, легки и интегрированы во все системы, в которых они нуждаются: высокоскоростной процессорный контроллер, компас, считыватель штрих-кодов, камеру, слот для карт памяти и модем WiFi с подключением WiFi и Bluetooth.
Недостатки метода RTK
Диапазон относительно эталонной станции является ограниченным (обычно 10-20 км), потребность в канале связи в реальном времени и невозможность работать в условиях неблагоприятной спутниковой навигации. Большие инвестиции в покупку оборудования и программного обеспечения. Для решения кинематических задач в реальном времени были разработаны различные новые решения, такие как сеть RTK и более широкие технологии WARTK (Wide Area Real Time Kinematic). Первый предоставляет собой настройки из сети базовых станций, так что мобильный приемник в сельскохозяйственной машине принимает сигналы от нескольких опорных станций в зависимости от местоположения станции. Второй располагается с дециметровой точностью в реальном времени, причем возможное действие составляет более 400 км от базовой станции.
Сетевые методы
RTK создают сетевую инфраструктуру с опорных станций, которые непрерывно получают данные со спутников, а через каналы связи направляют их на центральный сервер с помощью специального программного обеспечения для мониторинга данных. Данные собираются там, устраняются неоднозначности, а отредактированный сигнал отправляется на мобильные приемники, используемые, например, на ферме. Мобильный приемник получает информацию с сервера через GSM, Интернет или радиосвязь в реальном времени и вычисляет свои координаты с сантиметровой точностью с использованием программного алгоритма RTK. В отличие от систем с одной станцией, сетевое взаимодействие обеспечивает высокую точность работы на больших расстояниях, чем опорные станции, а также более точное определение ошибок.
Сетевые методы бывают разных типов. Они реализованы в двух режимах – RTK и режиме пост-обработки. Постобработочные измерения доставляются после запроса и загрузки из Интернета. Сетевые методы относятся к виртуальным опорным станциям (VRS), FKP и дополнительным вспомогательным исправлениям. В АРС режиме, реальные спутниковые измерения от опорной станции преобразуются в искусственные по отношению к виртуальной опорной станции в непосредственной близости от техники на которой установлен gps приемник. Данные виртуальных станций используются мобильными приемниками, как и у реальных станций.
Сетевые дифференциальные методы генерируют дифференциальные поправки, которые передаются пользователям через геостационарные спутники. OmniSTAR – это основная и наиболее широко используемая глобальная сетевая дифференциальная спутниковая навигационная система с широким диапазоном. Обеспечивает корректировку работы в режиме реального времени с тремя уровнями точности: виртуальная опорная станция (VBS) – точность измерения; Расширенное обслуживание (XP) – Точность ниже 20 см и высокая точность обслуживания (HP) – Точность ниже 10 см.

Широкополосный RTK
Метод WARTK (Wide Area Real Time Kinematic) — это инновационный метод дифференциальной регулировки спутниковой навигации расширенного диапазона. Он был разработан в конце 1990-х годов группой исследований в Каталонском политехническом университете (СКП) в Барселоне. Он обеспечивает корректировку ионосферного воздействия через сеть опорных станций, расположенных на расстоянии до 1000 км друг от друга. Расхождения фиксируются в реальном времени мобильными приемниками на расстроянии более 400 км от базовых станций. Таким образом, WARTK преодолевает ограниченный диапазон классических методов RTK. По согласованию с Европейским космическим агентством WARTK использует наземную и спутниковую инфраструктуру Европейской геостационарной навигационной оверлейной службы, включая приемники GNSS. Этот метод чрезвычайно подходит для применения в изолированных местах,
В Украине услуги RTK предлагаются с едиными базовыми станциями и сетевыми услугами, которые все больше предпочитают фермеры в области точного земледелия. Инфраструктурные решения, оборудование и программное обеспечение от разных производителей и поставщиков. Клиенты могут выбирать по точности, объему, надежности и стоимости услуг. По словам представителей промышленности, те, кто хоть раз попробовал метод коррекции спутниковой навигации через RTK, вряд ли откажется от него когда либо.
Спутниковая навигация, используемая для повышения точности данных о местоположении  GNSS RTK-приемник, используемый для обзора лесной популяции в Швейцария
GNSS RTK-приемник, используемый для обзора лесной популяции в Швейцария
кинематическое определение местоположения в реальном времени (RTK ) — это метод спутниковой навигации, используемый для повышения точности данных о местоположении, полученных из спутниковых систем определения местоположения (глобальная навигация). спутниковые системы, GNSS ), такие как GPS, ГЛОНАСС, Galileo, NavIC и BeiDou. Он использует измерения фазы несущей волны сигнала в дополнение к информационному содержанию сигнала и полагается на одну опорную станцию или интерполированную виртуальную станцию для обеспечения поправок в реальном времени. с точностью до сантиметра уровня. В частности, со ссылкой на GPS, система обычно упоминается как повышение фазы несущей или CPGPS . Он применяется в землеустройстве, гидрографической съемке и в навигации беспилотных летательных аппаратов.
Содержание
- 1 Обзор
- 1.1 Предпосылки
- 1.2 Отслеживание фазы несущей
- 1.3 Практические соображения
- 2 См. Также
- 3 Ссылки
- 4 Внешние ссылки
Обзор
Общие сведения
Расстояние между приемником спутниковой навигации и спутником можно рассчитать, исходя из времени, которое требуется сигналу, чтобы пройти от спутника до приемника. Чтобы вычислить задержку, приемник должен согласовать псевдослучайную двоичную последовательность, содержащуюся в сигнале, с внутренне генерируемой псевдослучайной двоичной последовательностью. Поскольку спутниковому сигналу требуется время, чтобы достичь приемника, последовательность спутниковых сигналов задерживается по сравнению с последовательностью приемников. За счет увеличения задержки последовательности получателя в конечном итоге эти две последовательности выравниваются.
Точность результирующего измерения дальности по существу зависит от способности электроники приемника точно обрабатывать сигналы со спутника, а также от дополнительных источников ошибок, таких как не подавляемые ионосферные и тропосферные задержки, многолучевость, спутниковые часы и эфемериды ошибки и т. Д.
отслеживание фазы несущей
RTK следует той же общей концепции, но использует сигнал спутника несущая в качестве сигнала, игнорируя содержащуюся в нем информацию. RTK использует фиксированную базовую станцию и ровер, чтобы уменьшить ошибку позиционирования ровера. Базовая станция передает данные коррекции на ровер.
Как описано в предыдущем разделе, расстояние до спутника по существу вычисляется путем умножения длины волны несущей на количество полных циклов между спутником и ровером и добавления разности фаз. Определение количества циклов нетривиально, поскольку сигналы могут быть сдвинуты по фазе на один или несколько циклов. Это приводит к ошибке, равной ошибке в расчетном количестве циклов, умноженном на длину волны, которая составляет 19 см для сигнала L1. Решение этой так называемой проблемы поиска целочисленной неоднозначности приводит к сантиметровой точности. Ошибка может быть уменьшена с помощью сложных статистических методов, которые сравнивают измерения по сигналам C / A и сравнивая полученные диапазоны между несколькими спутниками.
Улучшение, возможное при использовании этого метода, потенциально очень велико, если продолжать предполагать точность блокировки 1%. Например, в случае GPS код грубого обнаружения (C / A), который транслируется в сигнале L1, изменяет фазу на 1,023 МГц, но сама несущая L1 составляет 1575,42 МГц, что меняет фазу более чем в тысячу раз чаще. Таким образом, ошибка ± 1% при измерении фазы несущей L1 соответствует ошибке ± 1,9 мм в оценке базовой линии.
Практические соображения
На практике в системах RTK используется один приемник базовой станции и ряд мобильных единиц. Базовая станция повторно транслирует фазу несущей, которую она наблюдает, и мобильные устройства сравнивают свои собственные измерения фазы с данными, полученными от базовой станции. Существует несколько способов передачи сигнала коррекции от базовой станции к мобильной станции. Самый популярный способ обеспечения недорогой передачи сигнала в реальном времени — использование радиомодема, обычно в диапазоне УВЧ. В большинстве стран определенные частоты выделяются специально для целей RTK. Большая часть геодезического оборудования имеет в стандартной комплектации встроенный радиомодем UHF-диапазона. RTK обеспечивает повышение точности примерно до 20 км от базовой станции.
Это позволяет устройствам вычислять их относительное положение с точностью до миллиметров, хотя их абсолютное положение имеет точность только с той же точностью, что и вычисленное положение объекта. базовая станция. Типичная номинальная точность для этих систем составляет 1 сантиметр ± 2 части на миллион (ppm) по горизонтали и 2 сантиметра ± 2 ppm по вертикали.
Хотя эти параметры ограничивают применимость метода RTK для общей навигации, техника идеально подходит для таких ролей, как геодезия. В этом случае базовая станция расположена в известном месте съемки, часто в эталонном, и мобильные устройства могут затем составить высокоточную карту, сделав привязку к этой точке. RTK также нашел применение в системах автопривода / автопилота, точном земледелии, системах управления машинами и аналогичных ролях.
Сети RTK расширяют использование RTK на большую территорию, содержащую сеть опорных станций. Эксплуатационная надежность и точность зависят от плотности и возможностей сети опорных станций.
A Сеть постоянно действующих базовых станций (CORS) — это сеть базовых станций RTK, которые транслируют поправки, обычно через Интернет-соединение. В сети CORS повышается точность, поскольку более одной станции помогают обеспечить правильное позиционирование и защищают от ложной инициализации отдельной базовой станции.
См. Также
- Дифференциальный GPS
- Европейская геостационарная служба наложения навигации (EGNOS)
- GAGAN
- Система позиционирования Galileo
- Глобальная система позиционирования
- ГЛОНАСС
- SWEPOS
- BeiDou
- NavIC
Справочная информация
Внешние ссылки
- Подробные концепции RTK Подробные концепции GNSS, RTK и спутникового позиционирования.
- Карта CORS Глобальная сеть постоянно действующих опорных станций.
- Карта GBAS Глобальная карта покрытия наземных дополнений Справочные маяки (GBAS).
- Рекомендации Руководство пользователя для GNSS-позиционирования с одной базой в реальном времени (NOAA)
- Интеграция RTK Руководство по интеграции приемников RTK в БПЛА и робототехнику
Кинематика реального времени
Описание
Принцип работы режима RTK заключается в мгновенной обработке спутниковых измерений в управляющем микропрограммном обеспечении (МПО) мобильного спутникового приемника (ровера) с использованием корректирующей информации от базового приемника. Источником потока корректирующей информации (поправок) может быть как базовый приемник пользователя, так и сеть референтных станций. Базовый приемник устанавливается на пункте с известными координатами, а ровер – на точке, координаты которой необходимо определить. Максимальное расстояние между базой и ровером зависит от способа передачи корректирующей информации (по радиоканалу, по голосовой связи или по сети Интернет) и может достигать 70 км. На базовой станции рассчитывается разность между известными координатами пункта и координатами, полученными по спутниковым (ГНСС) наблюдениям. Эта разность передается в корректирующей информации на ровер, чтобы он мог внести эту поправку в свои ГНСС-измерения. МПО ровера должно быть способно произвести математическую обработку ГНСС-данных и данных, полученных от базового приемника мгновенно. Таким образом достигается сантиметровая точность определения координат, которые пользователь может наблюдать в реальном времени без пост-обработки.
Преимущества
- сантиметровая точность определения координат;
- координаты ровера определяются в реальном времени;
- исключается использование специализированного ПО для пост-обработки.
Референсы
- Данная технология используется во всех ГНСС-приемниках Ориент Системс. Приемники используются для создания беспилотных транспортных средств совместно с университетом Иннополиса и ПАО «КАМАЗ»
- Приемники используются на опытном заводе «Микрон».
Real Time Kinematic (RTK, в переводе с англ. — «кинематика реального времени»[1]) — совокупность приёмов и методов получения плановых координат и высот точек местности сантиметровой точности с помощью спутниковой системы навигации посредством получения поправок с базовой станции, принимаемых аппаратурой пользователя во время съёмки.
Принцип работы
Радиосигнал со спутника при передаче подвергается различным искажениям. Выделяют три основных причины искажения сигнала: атмосферные неоднородности (ионосферные и тропосферные основные из них), помехи от стационарных и подвижных объектов, а также переотражение сигнала или многолучевость. С помощью GNSS-сигналов можно определить положение приёмника на поверхности Земли с дециметровой точностью. Однако из-за искажений без применения специального оборудования реальная точность позиционирования обычно измеряется в метрах или десятках метров (в зависимости от широты, количества видимых спутников и других условий). Искажения могут быть существенно уменьшены с помощью дополнительной наземной инфраструктуры — cистем дифференциальной коррекции.
Для получения поправок используются измерения фаз несущей GNSS-сигналов одновременно на двух GNSS-приёмниках. Координаты одного из приёмников (базового) должны быть точно определены (например, он может быть установлен на пункте государственной геодезической сети); он передает по каналу связи (радиомодем, интернет и др.) набор данных, называемых поправками. Полученный станцией спутниковый сигнал обрабатывается ПО в соответствии с программными алгоритмами и накопленной статистикой спутниковых эфемерид, после чего на базовую станцию передается дифференциальная поправка, уточняющая спутниковый сигнал.
Второй приёмник («ровер») может воспользоваться этими данными для точного определения местоположения (до 1 см в плане и 2 см по высоте) на расстояниях до 30 км от базового приёмника. Для передачи поправок используются радиомодемы, интернет и так далее. В настоящее время метод RTK используется на частотах L1, L2.
Поправки могут передаваться в формате RTCM SC-104 (коды сообщений 3, 18-21, 32, 1003—1008[2]), CMR и CMR+, RTCA, ATOM. Требуемая скорость передачи — 2400 бит/с и более, задержка передачи — не более 0.5−2 секунд. Для обычного DGPS достаточно было скоростей 200 бит/с и задержек до 10 сек.
Начиная с версии 3.0 стандарт RTCM SC-104 включает возможность передачи RTK-поправок для системы ГЛОНАСС.[2]. Версии 2.3 и последующие 3.х не совместимы, поэтому существуют параллельно.
В версии 3.2 (февраль 2013) добавляется сообщения Множественных Сигналов (Multiple Signal Messages (MSM)). Формат MSM позволяет приемнику использовать все спутниковые системы. Сообщения включают компактные и полные сообщения для псевдодальностей, фазовых измерений, отношения несущей (сигнала) к шуму (стандартное и высокое разрешение), частоту фазовых измерений.
В октябре 2016 года вышла версия RTCM 3.3 (обозначение RTCM 10403.3) в которой к принятым сообщениям для систем GPS, ГЛОНАСС, Galileo и QZSS добавлено BeiDou (BDS), а также объединены все предыдущие дополнения версий 3.х.
Применение
Технология используется в большом количестве отраслей промышленности: в геодезии и земельном кадастре, строительстве, точном земледелии. В странах, где технология широко распространена, используется для мониторинга промышленных объектов.
Преимущества
Основным преимуществом режима является возможность точной обработки сигнала в реальном времени. Существует несколько видов использования навигационных поправок: постпроцессинг и PPP, DGPS, RTK. Различаются они точностью полученных измерений и временем, затраченным на их получение.
Так, режим постобработки (постпроцессинг, апостериорная обработка данных) позволяет добиться наибольшей точности (в субсантиметровых пределах), но требует значительного времени на сбор и обработку данных. PPP (precise point positioning) подразумевает получение высокоточных данных эфемерид и поправок к часам спутников (от суток («быстрые» эфемериды) до двух недель («финальные» эфемериды)).
В режиме DGPS времени затрачивается существенно меньше — фактически, работы могут проводиться в реальном времени. Однако точность поправок DGPS лежит в пределах метра. Режим RTK позволяет получать поправки в реальном времени, с точностью порядка 1 см в плане и 2 по высоте.
Недостатки
GPS-RTK может не работать, либо работать практически также медленно как DGPS, в случае видимости менее, чем 5 спутников.[3]
См. также
- DGPS
- WAAS
- PPP
Примечания
- ↑ Серапинас Б.Б. Глобальные системы позиционирования. — Издание 3-е, исправленное и дополненное. — Москва: ИФК «Каталог», 2002. — С. 62. — 106 с. — ISBN 5-94349-032-9.
- ↑ 1 2 rtcm sc-104 version 2.2 (недоступная ссылка — история). Проверено 14 февраля 2012. Архивировано 15 сентября 2013 года.
- ↑ GPS and GPS+GLONASS RTK, Frank van Diggelen
Ссылки
- Ричард Лэнгли, «RTK GPS» / GPS World, September 1998 (англ.)
Принцип работы
Радиосигнал со спутника при передаче подвергается различным искажениям. Выделяют три основных причины искажения сигнала: атмосферные неоднородности (ионосферные и тропосферные основные из них), помехи от стационарных и подвижных объектов, а также переотражение сигнала или многолучевость. С помощью GNSS-сигналов можно определить положение приёмника на поверхности Земли с дециметровой точностью. Однако из-за искажений без применения специального оборудования реальная точность позиционирования обычно измеряется в метрах или десятках метров (в зависимости от широты, количества видимых спутников и других условий). Искажения могут быть существенно уменьшены с помощью дополнительной наземной инфраструктуры — систем дифференциальной коррекции.
Для получения поправок используются Измерения фазы несущей GNSS-сигналов одновременно на двух GNSS-приёмниках. Координаты одного из приёмников (базового, неподвижного) должны быть точно определены (например, он может быть установлен на пункте государственной геодезической сети); он передает по каналу связи (радиомодем, gsm 3G модем, интернет и др.) набор данных, называемых поправками. Поправки, полученные станцией, и спутниковый сигнал обрабатывается ПО в соответствии с программными алгоритмами и накопленной статистикой спутниковых эфемерид. После чего на второй приемник (подвижный, «ровер») с базовой станции передается дифференциальная поправка, уточняющая спутниковый сигнал.
Ровер может воспользоваться этими данными для точного определения местоположения (до 1 см в плане (1 cm + 1 ppm) и 2 см по высоте) на расстояниях до 30 км от базового приёмника. Для передачи поправок используются радиомодемы, интернет и так далее. В настоящее время метод RTK используется на частотах L1, L2.
Полевые базовые станции передают сигналы DGPS обычно через УКВ-радиомодем или через операторов сотовой связи. При использовании радиосигналов метрового диапазона холмистая и горная местность обычно не влияет на приём сигнала. Однако сигналы не доходят до глубоких каньонов, расположенных далеко от базовых станции и в сильно залесённой местности. А так же ограничивается наличием вышек сотовой связи, в случае использования GSM-модема.
Мы готовы предложить Вам
Наши клиенты довольны качеством нашего оборудования

Курсоуказатель AGROGLOBAL AGN8000
Агронавигатор “Агроглобал” разработан Российской компанией РОСАГРОСЕРВИС. В данном приборе реализовано оптимальное соотношение цены и функциональных возможностей.

Агронавигатор AGROGLOBAL AGN АТ5 (одночастотный приемник)
Работает как простой курсоуказатель для широкого спектра работ. Главным его преимуществом является возможность подключения к системе контроля внесения удобрений.

Блок управления опрыскивателем AGN CMU-01M
Блок управления контроля является составной частью системы контроля над процессом внесения жидких удобрений. Позволяет автоматизировать процесс обработки поля, тем самым значительно минимизировать человеческий фактор. Используется совместно с системой агронавигации AGN AT5.
Агронавигатор Agroglobal AGN АТ5 (2х частотный приемник + RTK)
В базовой комплектации работает как простой курсоуказатель. Однако, основная задача прибора — работа в составе системы контроля над процессом внесения удобрений при проведении полевых работ.
Сделать заказ
Если Вы определились с решением, мы готовы записать Вас на
установку в сервисный центр.

Менеджер

Менеджер

Менеджер