Силы, действующие на детали кривошипно-шатунного механизма.
Силы,
действующие в двигателе внутреннего
сгорания, можно разделить на движущие
силы, силы инерции и силы сопротивления.
Движущие
силы
— это силы давления газов в цилиндре.
Силы
инерции
образуют возвратно-поступательно
движущиеся и вращающиеся части двигателя.
Силы сопротивления делят на силы
сопротивления потребителя энергии
двигателя и силы трения в KШM (поршня и
поршневых колец о стенку цилиндра, в
подшипниках и т. п.), на преодоление
которых затрачивается дополнительная
работа.
Главными
силами
считают силы давления газов, силы инерции
в двигателе и силы сопротивления
потребителя энергии, совершающие
полезную работу. Все силы, действующие
в двигателе, изменяются во времени.
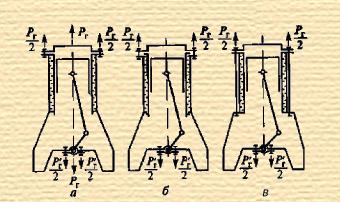
Силовые
схемы двигателей с жидкостным охлаждением:
а — с несущим блоком цилиндров, б — с
несущей рубашкой; в — с несущими силовыми
шпильками
Схема
сил, действующих на кривошипно-шатунный
механизм, показана на рисунке 4.4.
Направление сил к центру кривошипа
принято за положительное.
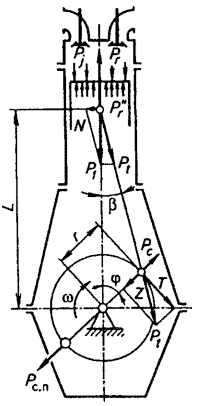
Рисунок
4.4. Силы, действующие в кривошипно-шатунном
механизме
Сила
давления газов на поршень со стороны
камеры сгорания (ее определяют по
индикаторной диаграмме)
Pг
= ргFп
где
рг
— давление газов в цилиндре, МПа; Fп
— площадь поршня, м2.
Сила
давления газов со стороны картера (это
давление обычно равно атмосферному р0)
Р0
= р0Fп
Сила
инерции возвратно-поступательно
движущихся частей равна произведению
массы этих частей на их ускорение в
данный момент времени:
Pj
= — mj = — mrω2
(cosφ + cos2φ)
где
m
= mпк
+ 0,275mш;
mпк
— масса поршня и других деталей,
движущихся поступательно; mш
— масса верхней головки шатуна, обычно
принимаемая равной 0,2…0,3 массы всего
шатуна; r —радиус кривошипа; ω
и φ
— соответственно частота вращения и
угол поворота коленчатого вала.
Суммарная
сила, действующая на поршень,
Pl
= Pг
— P0
+Pj
Сила
Pl,
приложенная к оси поршневого пальца и
направленная по оси цилиндра, может
быть разложена на силу N, действующую
перпендикулярно оси цилиндра, и силу
Рt
действующую по оси шатуна.
Сила
N прижимает поршень к стенке цилиндра,
что вызывает износ их поверхностей. Она
изменяется по значению и направлению,
поочередно прижимая поршень то к одной,
то к другой стороне цилиндра.
Силу
Рt
перенесенную на ось шатунной шейки,
можно разложить на касательную силу Т,
действующую перпендикулярно кривошипу
коленчатого вала, и радиальную силу Z,
направленную по оси кривошипа:
Т=Рl
[sin(φ + β)/cos β]; Z=Рl
[sin(φ + β)/cos β],
где
β
— угол отклонения шатуна от оси цилиндра.
Вращающий
момент на валу двигателя, необходимый
для совершения полезной работы,
Mвр
= Тr.
Работа
касательных сил затрачивается на
преодоление сил сопротивления и изменение
частоты вращения коленчатого вала. В
период рабочего хода совершается
полезная работа и увеличивается частота
вращения коленчатого вала. Избыточная
энергия аккумулируется всеми вращающимися
частями, главным образом маховиком и
потребителем энергии, и возвращается
в систему, когда ее не хватает при
совершении других тактов двигателя.
Чем больше момент инерции маховика и
число цилиндров, тем равномернее
вращается вал двигателя.
Сила
N на плече L создает реактивный
(опрокидывающий) момент, который стремится
опрокинуть двигатель. Он равен вращающему
моменту по значению, но противоположен
по направлению. Опрокидывающий момент
воспринимается опорами и вызывает
колебания всего двигателя.
Вращающиеся
части (шатунная шейка коленчатого вала
и часть шатуна, отнесенная к оси шатунной
шейки коленчатого вала) создают
центробежную силу Рс
= — mrω2.
Эта сила, направленная от центра вращения
по оси кривошипа, вместе с радиальной
силой Z нагружает подшипники коленчатого
вала. Центробежная сила Рс
обычно уравновешивается центробежной
силой противовесов Рс.п,
устанавливаемых на коленчатом валу с
противоположной стороны шатунной шейки,
или за счет изменения формы коленчатого
вала.
Все
силы и моменты, возникающие при работе
поршневых ДВС, непрерывно изменяясь по
значению и направлению, передаются на
опоры двигателя и раму автомобиля. При
этом возникают вибрации, снижающие
эффективную мощность и топливную
экономичность (вследствие затрат энергии
на возбуждение вибрации и дополнительных
механических потерь), ослабляются
крепления агрегатов и деталей (что
ускоряет в итоге износ деталей), нарушаются
регулировки, снижается надежность
контрольно-измерительных приборов.
Поэтому
уменьшение влияния переменных сил и
моментов, действующих на двигатель,
относится к числу основных требований,
предъявляемых в ДВС.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
При работе двигателя в КШМ каждого цилиндра действуют силы: давления газов на поршень Р, массы поступательно-движущихся частей КШМ G, инерции поступательно-движущихся частей Pи и трения в КШМ Рт.
Силы трения не поддаются точному расчету; их считают включенными в сопротивление гребного винта и не принимают во внимание. Следовательно, в общем случае на поршень действует движущая сила Pд = Р + G + Pи.
Силы, отнесенные к 1 м2 площади поршня,

Движущее усилие Рд приложено к центру поршневого пальца (пальца крейцкопфа) и направлено вдоль оси цилиндра (рис. 216). На пальце поршня Pд раскладывается на составляющие:
Рн — нормальное давление, действующее перпендикулярно к оси цилиндра и прижимающее поршень к втулке;
Рш— усилие, действующее вдоль оси шатуна и передаваемое на ось шейки кривошипа, где оно в свою очередь раскладывается на составляющие Р? и РR (рис. 216).

Усилие Р? действует перпендикулярно к кривошипу, вызывает его вращение и называется касательным. Усилие РR действует вдоль кривошипа и называется радиальным. Из геометрических соотношений имеем:

Численное значение и знак тригонометрических величин

для двигателей с различными постоянными КШМ ? =R / L можно принять по данным
Величину и знак Рд определяют из диаграммы движущих сил, представляющей графическое изображение закона изменения движущей силы за один оборот коленчатого вала для двухтактных двигателей и за два оборота для четырехтактных в зависимости от угла поворота коленчатого вала. Чтобы получить значение движущей силы, необходимо предварительно построить следующие три диаграммы.
1. Диаграмма изменения давления р в цилиндре в зависимости от угла поворота кривошипа ?. По данным расчета рабочего процесса двигателя строят теоретическую индикаторную диаграмму, по которой определяют давление в цилиндре р в зависимости от его объема V. Для того, чтобы перестроить индикаторную диаграмму из координат рV в координаты р—? (давление — угол поворота вала), линии в. м. т. и н. м. т. следует продлить вниз и провести прямую АВ, параллельную оси V (рис. 217). Отрезок АВ делится точкой О пополам и из этой точки радиусом АО описывается окружность. От центра окружности точки О в сторону н. м. т. откладывают отрезок OO‘ = 1 / 2 R2 / L поправка Брикса. Так как

Значение постоянной КШМ ? = R / L принимают по опытным данным. Чтобы получить величину поправки OO’, в масштабе диаграммы в формулу OO’ = 1 / 2 ?R вместо R подставляют значение отрезка АО. Из точки О’, которая называется полюсом Брикса, описывают произвольным радиусом вторую окружность и делят ее на любое число равных частей (обычно через каждые 15°). Из полюса Брикса О‘ через точки деления проводят лучи. Из точек пересечения лучей с окружностью радиусом АО проводят вверх прямые, параллельные оси р. Затем на свободном месте чертежа строят с помощью измерителя координаты давления газов р — угол поворота кривошипа ?°; принимая за начало отсчета линию атмосферного давления, снимают с диаграммы р—V значения ординат процессов наполнения и расширения для углов 0°, 15°, 30°, …, 180° и 360°, 375°, 390°, …, 540°, переносят их в координаты для этих же углов и соединяют полученные точки плавной кривой. Аналогично строят участки сжатия и выпуска, но в этом случае поправку Брикса ОО‘ откладывают на отрезке АВ в сторону в. м. т. В результате указанных построений получают развернутую индикаторную диаграмму (рис. 218, а), по которой можно определить давление газов р на поршень для любого угла ? поворота кривошипа. Масштаб давлений развернутой диаграммы будет такой же, как и на диаграмме в координатах р—V. При построении диаграммы p = f(?) силы, способствующие движению поршня, считаются положительными, а силы, препятствующие этому движению,— отрицательными.
2. Диаграмма сил массы возвратно-поступательно-движущихся частей КШМ. В тронковых двигателях внутреннего сгорания масса поступательно-движущихся частей включает массу поршня и часть массы шатуна. В крейцкопфных дополнительно входят массы штока и ползуна. Массу частей можно подсчитать, если имеются чертежи с размерами этих деталей. Часть массы шатуна, совершающая возвратно-поступательное движение, G1 = Gш l1 / l, где Gш— масса шатуна, кг; l — длина шатуна, м; l1 — расстояние от центра тяжести шатуна до оси кривошипной шейки, м:


Для предварительных расчетов удельные значения массы поступательно-движущихся частей могут быть приняты: 1) для тронковых быстроходных четырехтактных двигателей 300—800 кг/м2 и тихоходных 1000—3000 кг/м2; 2) для тронковых быстроходных двухтактных двигателей 400—1000 кг/м2 и тихоходных 1000— 2500 кг/м2; 3) для крейцкопфных быстроходных четырехтактных двигателей 3500—5000 кг/м2 и тихоходных 5000—8000 кг/м2;
4) для крейцкопфных быстроходных двухтактных двигателей 2000—3000 кг/м2 и тихоходных 9000—10 000 кг/м2. Так как величина массы поступательно-движущихся частей КШМ и их направление не зависят от угла поворота кривошипа ?, то диаграмма сил массы будет иметь вид, показанный на рис. 218, б. Строится эта диаграмма в том же масштабе, что и предыдущая. На тех участках диаграммы, где сила массы способствует движению поршня, она считается положительной, а там, где препятствует,— отрицательной.
3. Диаграмма сил инерции поступательно-движущихся частей. Известно, что сила инерции поступательно-движущегося тела Ри =Gaн (G — масса тела, кг; а — ускорение, м/сек2). Масса поступательно-движущихся частей КШМ, отнесенная к 1 м2 площади поршня, m = G / F. Ускорение движения этой массы определяют по формуле (172). Таким образом, сила инерции поступательно-движущихся частей КШМ, отнесенная к 1 м2 площади поршня, может быть определена для любого угла поворота кривошипа по формуле

Расчет Ри для различных ? целесообразно производить в табличной форме. По данным таблицы строят диаграмму сил инерции поступательно-движущихся частей в том же масштабе, что и предыдущие. Характер кривой Pи= f (?) дан на рис. 218, в. В начале каждого хода поршня силы инерции препятствуют его движению. Поэтому силы Ри имеют отрицательный знак. В конце же каждого хода силы инерции Ри способствуют этому движению и поэтому приобретают положительный знак.

Силы инерции можно определить также графическим методом. Для этого берут отрезок АВ, длина которого соответствует ходу поршня в масштабе оси абсцисс (рис. 219) развернутой индикаторной диаграммы. От точки А вниз по перпендикуляру откладывают в масштабе ординат индикаторной диаграммы отрезок АС, выражающий силу инерции поступательно-движущихся частей в в. м. т. (? = 0), равную Pи(в. м. т) = G / F R?2 (1 + ?). В том же масштабе от точки В откладывают отрезок ВД — силу инерции в н. м. т. (? = 180°), равную Ри(н.м.т) = — G / F R?2 (1 — ?). Точки С и Д соединяют прямой. От точки пересечения СД и АВ откладывают в масштабе ординат отрезок ЕК, равный 3? G/А R?2. Точку К соединяют прямыми с точками С и Д, и полученные отрезки КС и КД делят на одинаковое число равных частей, но не менее чем на пять. Точки деления нумеруют в одном направлении и одноименные соединяют прямыми 1—1, 2—2, 3—3 и т. д. Через точки С и Д и точки пересечения прямых, соединяющих одинаковые номера, проводят плавную кривую, выражающую закон изменения сил инерции при нисходящем движении поршня. Для участка, соответствующего движению поршня к в. м. т., кривая сил инерции будет зеркальным отображением построенной.
Диаграмма движущих сил Pд= f (?) строится путем алгебраического суммирования ординат соответствующих углов диаграмм

При суммировании ординат этих трех диаграмм сохраняется указанное выше правило знаков. По диаграмме Рд= f (?) молено определить движущее усилие, отнесенное к 1 м2 площади поршня для любого угла поворота кривошипа.
Сила, действующая на 1 м2 площади поршня, будет равна соответствующей ординате на диаграмме движущих усилий, умноженной на масштаб ординат. Полная сила, движущая поршень,

где рд— движущая сила, отнесенная к 1 м2 площади поршня, н/м2; D — диаметр цилиндра, м.
По формулам (173) с использованием диаграммы движущих сил можно определить значения нормального давления рн силы Рш, касательной силы Р? и радиальной силы PR при различных положениях кривошипа. Графическое выражение закона изменения силы Р? в зависимости от угла ? поворота кривошипа называется диаграммой касательных сил. Расчет значений Р? для разных ? производится с использованием диаграммы Pд= f:(?) и по формуле (173).

По данным расчета строят диаграмму касательных сил для одного цилиндра двухтактного (рис. 220, а) и четырехтактного двигателей (рис. 220,6). Положительные значения откладывают вверх от оси абсцисс, отрицательные — вниз. Касательная сила считается положительной, если она направлена в сторону вращения коленчатого вала, и отрицательной, если она направлена против вращения коленчатого вала. Площадь диаграммы Р?= f (?) выражает в определенном масштабе работу касательной силы за один цикл. Касательные усилия для любого угла ? поворота вала можно определить следующим простым способом. Описывают две окружности — одну радиусом кривошипа R и вторую вспомогательную — радиусом ?R (рис. 221). Проводят для данного угла ? радиус ОА и продлевают его до пересечения со вспомогательной окружностью в точке В. Строят ?ВОС, у которого ВС будет параллельна оси цилиндра, а СО — параллельна оси шатуна (для. данного ?). От точки А откладывают в выбранном масштабе величину движущего усилия Рд для данного ?; тогда отрезок ЕD, проведенный перпендикулярно к оси цилиндра до пересечения с прямой AD, параллельной СО, и будет искомым Р? для выбранного ?.
Изменение касательной силы ?Р? двигателя можно представить в виде суммарной диаграммы касательных сил ?Р?= f (?). Для ее построения необходимо столько диаграмм Р? = f (?), сколько цилиндров имеет двигатель, но сдвинутых одна относительно другой на угол ?всп поворота кривошипа между двумя последующими вспышками (рис. 222, а—в). Алгебраически сложив ординаты всех диаграмм при соответствующих углах, получают для различных положений кривошипа суммарные ординаты. Соединив их концы, получают диаграмму ?P? = f (?). Диаграмма суммарных касательных усилий для двухцилиндрового двухтактного двигателя показана на рис. 222, в. Аналогичным образом строят диаграмму и для многоцилиндрового четырехтактного двигателя.

Диаграмму ?Р? = f (?) можно построить также аналитическим путем, располагая только одной диаграммой касательных усилий для одного цилиндра. Для этого необходимо разбить диаграмму Р? = f (?) на участки через каждые ?всп градусов. Каждый участок разделяют на одинаковое число равных отрезков и нумеруют, рис. 223 (для четырехтактного z = 4). Ординаты кривой Р? = f (?), соответствующие одним и тем же номерам точек, алгебраически суммируют, в результате чего получают ординаты суммарной кривой касательных усилий.

На диаграмму ?Р? = f (?) наносят среднюю величину касательной силы Р? cp. Для определения средней ординаты Р? cp суммарной диаграммы касательных сил в масштабе чертежа необходимо площадь между кривой и осью абсцисс на участке длиной ?всп поделить на длину этого участка диаграммы. Если кривая суммарной диаграммы касательных сил пересекает ось абсцисс, то для определения Р? ср нужно алгебраическую сумму площади между кривой и осью абсцисс разделить на длину участка диаграммы. Отложив на диаграмме величину Р? ср вверх от оси абсцисс, получают новую ось. Участки между кривой и этой осью, расположенные над линией Р? , выражают положительную работу, а под осью — отрицательную. Между Р? ср и силой сопротивления приводимого в действие агрегата должно существовать равенство.
Можно установить зависимость Р? ср от среднего индикаторного давления рi: для двухтактного двигателя Р? cp = pi z /? и для четырехтактного двигателя P? cp = pi z /2? (z – число цилиндров). По P? cp определяют средний крутящий момент на валу двигателя

где D — диаметр цилиндра, м; R — радиус кривошипа, м.
В кривошипно-шатунном механизме двигателя внутреннего сгорания действуют силы от давления газов Рг, силы инерции Pj, центробежные Рс и силы трения и полезного сопротивления.
Изменение давления газов на днище поршня представляется в виде индикаторной диаграммы ![]() или
или![]() , где S — ход поршня, м; V— объем цилиндра (Vh+ Vc), м3.
, где S — ход поршня, м; V— объем цилиндра (Vh+ Vc), м3.
Для удобства выполнения последующих расчетов индикаторную диаграмму перестраивают в координаты ![]() , где
, где ![]() — угол поворота кривошипа (развернутая индикаторная диаграмма). При перестроении графика давление отсчитывают от атмосферной линии, т. е. от рг= (pа—pо), где р0 — давление окружающей среды; ра — абсолютное давление.
— угол поворота кривошипа (развернутая индикаторная диаграмма). При перестроении графика давление отсчитывают от атмосферной линии, т. е. от рг= (pа—pо), где р0 — давление окружающей среды; ра — абсолютное давление.
6
Индикаторные диаграммы для карбюраторного двигателя и дизеля показаны на рис. 3.
Индикаторная диаграмма в развернутом виде показана на рис. 4. Для перестроения индикаторной диаграммы из координат p—V в координаты р—![]() под ней чертят полуокружность радиусом R, имея в виду, что 2R=S, затем полуокружность делят на дуги, охватывающие углы 15 или 30°, и точки на полуокружности соединяют с центром. Затем смещают центр на величину
под ней чертят полуокружность радиусом R, имея в виду, что 2R=S, затем полуокружность делят на дуги, охватывающие углы 15 или 30°, и точки на полуокружности соединяют с центром. Затем смещают центр на величину ![]()
Рис. 3. Индикаторные диаграммы:
а — карбюраторного двигателя: б—дизеля
(поправка Брикса), учитывающую конечную длину шатуна (смещение в сторону н. м. т.) Из нового центра строят лучи параллельно радиусам, проведенным к точкам на окружности. Из полученных новых точек на окружности проводят перпендикуляры к диаметру и продолжают их до пересечения с линиями индикаторной диаграммы. Точки пересечения перпендикуляров с линиями индикаторной диаграммы дают значения рг, соответствующие данному углу поворота кривошипа. Значения рг берут от линии р0 и откладывают на развертке. Полученные точки соединяют плавной кривой.
Кроме сил от давления газов на поршень в кривошипно-шатунном механизме действуют силы инерции возвратно-поступательно движущихся масс. Суммарная сила, отнесенная к оси пальца
![]() . (8)
. (8)
Для удобства сложения сил давления газов Рг и сил инерции Pj возвратно-поступательно движущихся масс берут их в одинаковом масштабе, тогда PS можно получить графическим суммированием (рис. 4.).
![[image]](https://injzashita.com/images/os_tik_avtrdv/os_tik_avtrdv-48.jpg "os_tik_avtrdv-48.jpg")
Рис. 4. Индикаторная диаграмма карбюраторного двигателя в координатах p-V и Pг=f(a); Pj= f(a) и PS = f(a)
Силы инерции возвратно-поступательно движущихся масс подсчитывают, приближенно относя их к единице площади поршня (м2 или см2):
![]() , (9)
, (9)
где ![]() и
и ![]() — соответственно силы инерции первого и второго порядков; m1— масса, сосредоточенная на оси верхней головки шатуна.
— соответственно силы инерции первого и второго порядков; m1— масса, сосредоточенная на оси верхней головки шатуна.
Силы инерции, направленные так же, как и силы от давления газов, считают положительными, если же они направлены в противоположную сторону — отрицательными.
Силы инерции вращающихся масс К’ действуют по направлению радиуса кривошипа и определяют их в предположении, что ![]() — частота вращения- кривошипа — неизменна. При расчетах принимают частоту вращения, соответствующую работе двигателя с номинальной частотой вращения коленчатого вала,
— частота вращения- кривошипа — неизменна. При расчетах принимают частоту вращения, соответствующую работе двигателя с номинальной частотой вращения коленчатого вала,
![]() (10)
(10)
где m2 — масса, сосредоточенная на оси нижней головки шатуна.
При определении сил инерции, действующих в кривошипно-шатунном механизме, сложные формы массы деталей двигателей заменяют условными массами, сосредоточенными в точке, совпадающей с центром, тяжести детали, или в точке, лежащей на оси, проходящей через центр тяжести детали или системы деталей (рис. 5, а—в).
Масса m1, сосредоточенная на оси верхней головки шатуна, представляет собой сумму масс:
![]() ,
,
где ![]() пор — масса поршня, кг (кгс×с2/м); тк — масса поршневых колец; тп — масса поршневого пальца;
пор — масса поршня, кг (кгс×с2/м); тк — масса поршневых колец; тп — масса поршневого пальца; ![]() в.г.ш.— масса шатуна, отнесенная к верхней головке; обычно принимают
в.г.ш.— масса шатуна, отнесенная к верхней головке; обычно принимают ![]() в.г.ш = (0,25¸0,3) тш.
в.г.ш = (0,25¸0,3) тш.
Масса нижней головки шатуна, сосредоточенная на оси кривошипа,
![]() ,
,
где тш — масса шатуна, кг (кгс×с2/м).
Для определения сил, действующих на опорные подшипники, необходимо, отнести массу кривошипной шейки, массу щек и массу нижней головки шатуна на ось кривошипной шейки. Так как центр тяжести щек не совпадает с осью шейки кривошипа, то необходимо пересчитать действительную массу тдщ на эквивалентную тэщ:
![]()
где r — расстояние центра тяжести действительной массы щеки до оси вращения коленчатого вала; R — радиус кривошипа.
Для приближенных :расчетов можно воспользоваться данными удельных масс поршней и шатунов, приведенных в табл. 1. Суммарная масса, отнесенная к оси кривошипа,
![]() ,
,
где ![]() — масса кривошипной шейки;
— масса кривошипной шейки; ![]() — масса щек.
— масса щек.
Если части щек, примыкающие к кривошипной шейке, имеют сложную форму, то их массы определяют методом расчленение сложной формы на простые элементы, позволяющие с достаточной точностью найти общую массу как сумму масс отдельных элементов данной детали.
![[image]](https://injzashita.com/images/os_tik_avtrdv/os_tik_avtrdv-65.jpg "os_tik_avtrdv-65.jpg")
Рис. 5. Схема масс шатунно-кривошипного механизма:
а — определение массы щеки; б,в — распределение массы шатуна между верхней и нижней головками
Ранее был рассмотрен случай, когда движущиеся массы приводят к двум точкам — верхней и нижней головкам шатуна. Иногда эту систему рассматривают состоящей из трех масс, две из которых сосредоточены в верхней и нижней головках шатуна, а третья—в центре тяжести шатуна. Так как эта масса в последующих расчетах деталей на прочность существенного влияния не оказывает, то при расчетах на прочность деталей автомобильных и тракторных двигателей пользуются схемой, состоящей из двух масс.
10
Для предварительного определения масс деталей кривошипно-шатунного механизма можно воспользоваться данными табл. 1. В таблице массы поршней и .шатунов автомобильных и тракторных двигателей отнесены к площади поршня. —
Таблица 1.
|
Тип двигателя |
Удельная масса, кг/м2 (г/см2)
|
|
Карбюраторные двигатели Автомобильные Дизели Тракторные дизели |
100—150 (10—15) 200—250 (20—25) 200—300 (20—30) |
120—280 (12—28) — — 250—400 (25—40) |
120—200 (12—20) 300—400 (30-40) 350—550 (35—55) |
![[image]](https://injzashita.com/images/os_tik_avtrdv/os_tik_avtrdv-105.jpg "os_tik_avtrdv-105.jpg") На рис. 6 показана схема сил, действующих в кривошипно-Шатунном механизме. Суммарная сила
На рис. 6 показана схема сил, действующих в кривошипно-Шатунном механизме. Суммарная сила ![]() приложена к верхней головке шатуна и разложена на две составляющие: одна, (S) направлена по шатуну, а другая (N) — нормально к стенке цилиндра. Из треугольников со сторонами N, S,
приложена к верхней головке шатуна и разложена на две составляющие: одна, (S) направлена по шатуну, а другая (N) — нормально к стенке цилиндра. Из треугольников со сторонами N, S, ![]() определяют силы:
определяют силы:
![]() ; (11)
; (11)
![]() , (12)
, (12)
где ![]() — угол отклонения шатуна от оси цилиндра.
— угол отклонения шатуна от оси цилиндра.
Сила S может быть перенесена в нижнюю головку шатуна на ось кривошипной шейки и разложена на две составляющие: К — силу, действующую вдоль кривошипа (щеки коленчатого вала), и T — касательную силу, приложенную к точке на окружности с радиусом, равным R.
Рис. 6. Силы, действующие в шатунно-кривошипном механизме
Силы К и Т зависят от углов ![]() поворота кривошипа и отклонения
поворота кривошипа и отклонения ![]() шатуна от оси цилиндра:
шатуна от оси цилиндра:
![]() ; (13)
; (13)
![]() . (14)
. (14)
Силы N, S, К, Т для удобства пользования в последующих расчетах относят к единице площади поршня м2 (см2). Это позволяет некоторые операции по сложению сил производить графическим методом. На рис. 7 силы N, S, К, Т показаны в зависимости от ![]() .
.
11
Из схемы сил, действующих в кривошипно-шатунном механизме, видно, что кривошипная шейка нагружается силами
![]() ;
;![]() ;
;![]()
где ![]() — центробежная сила.
— центробежная сила.
![[image]](https://injzashita.com/images/os_tik_avtrdv/os_tik_avtrdv-80.jpg "os_tik_avtrdv-80.jpg")
Рис. 7. Графики сил, действующих в шатунно-
кривошипном механизме: PΣ=f(α), S=f(α ),N=f(α ),T=f(α ) и К=f(α )
Суммарная сила, нагружающая кривошипно-шатунную шейку,
![]() , (15)
, (15)
так как сила Т сдвинута по отношению силы К на угол 90°, поэтому
![]() .
.
Произведение ТR = Мкр. Характер изменения Мкр соответствует характеру изменения тангенциальной силы Т.
12
Для определения среднего значения крутящего момента двигателя на диаграмме T=f(α ) (рис. 7) находят среднее значение тангенциальной силы (Н):
![]()
где μ — масштабный коэффициент; ![]() — площадь над осью диаграммы (горизонтальной);
— площадь над осью диаграммы (горизонтальной); ![]() — площадь под осью диаграммы; L— длина диаграммы.
— площадь под осью диаграммы; L— длина диаграммы.
![[image]](https://injzashita.com/images/os_tik_avtrdv/os_tik_avtrdv-106.jpg "os_tik_avtrdv-106.jpg") Крутящий момент одноцилиндрового двигателя (Н·м)
Крутящий момент одноцилиндрового двигателя (Н·м)
![]()
Для определения крутящего момента многоцилиндрового двигателя суммируют крутящие моменты отдельных цилиндров, для чего на график изменения ![]() одного цилиндра накладывают такие же графики для других цилиндров, учитывая при этом сдвиг по фазе рабочих ходов всех цилиндров двигателя. Затем графически суммируют и, определив
одного цилиндра накладывают такие же графики для других цилиндров, учитывая при этом сдвиг по фазе рабочих ходов всех цилиндров двигателя. Затем графически суммируют и, определив ![]() и
и ![]() находят (Н м)
находят (Н м)
![]() (16)
(16)
На рис. 8 показан характер изменения ![]() четырехцилиндрового четырехтактного двигателя.
четырехцилиндрового четырехтактного двигателя.
Рис. 8. График суммарного момента четырехцилиндрового четырехтактного
двигателя
Характер изменения крутящего момента одно-, двух-, четырех-, шести- и восьмицилиндровых двигателей показан на рис. 9.
Сдвиг по фазе (град) рабочих ходов соответственно у четырех- и двухтактных двигателей
![]() ,
,
где i — число цилиндров двигателя.
При работе двигателя на КШМ действуют силы давления газов в цилиндре, силы инерции движущихся масс, силы тяжести, силы трения и силы полезного сопротивления на коленчатом валу.
Силы трения по сравнению с другими силами невелики и зависят от многих факторов, не поддающихся точному учету (шероховатость трущихся поверхностей, условия смазки, тепловой режим, зазоры и др.). Поэтому в динамических расчетах ими пренебрегают, а учитывают механическим КПД двигателя.
Силы тяжести в двигателях высокооборотных и среднеоборотных не учитывают, так как они невелики по сравнению с действующими силами. Силы тяжести целесообразно учитывать в тех случаях, когда их относительная величина рт > 0,015рг. Такие силы тяжести возникают в малооборотных дизелях. Определяют силы тяжести по массам деталей из рабочих чертежей или результатам взвешивания. На диаграммах динамики силы тяжести представляют в виде прямой линии.
Силы инерции. При работе двигателя от поступательно движущихся масс (ПДМ) и неуравновешенных вращающихся масс (ВМ) на КШМ действуют силы инерции (рис. 11,3).

Сила инерции ПДМ приложена в центре поршневого пальца, действует вдоль оси цилиндра и равна, МПа,
Pi = — msi = — msrω2(cosφ + λшcos2φ) = PIcosφ + PIIcos2φ
Сила Pi состоит из сил инерции первого порядка PIcosφ и второго порядка PIIcos2φ, где PI = — msrω2 иPII = — msrω2λш — амплитуды соответствующих сил инерции. Силы инерции первого порядка в 3,5.. .5 раз больше сил инерции второго порядка. За один оборот коленчатого вала силы инерции первого порядка меняют направление один раз, а силы второго порядка — дважды. В районе ВМТ силы инерции препятствуют движению поршня, а в районе НМТ — способствуют ему. Значения сил инерции в ВМТ получим из предыдущей формулы при φ = 0°, а в НМТ при φ = 180°:
Pi ВМТ = — msrω2(1 + λш); Pi НМТ = msrω2(1 — λш).
Сила инерции ВМ постоянна по значению, приложена в центре шатунной шейки, направлена по кривошипу от центра вращения и равна, МПа,
Рr = mrrω2
Разложив силу Рr, получим ее вертикальную Рrcosφ и горизонтальную Рrsinφ составляющие, которые, действуя в соответствующих плоскостях, изменяют свое направление один раз за оборот, т. е. они первого порядка.
Суммарные силы инерции, действующие на двигатель в вертикальной плоскости,
PивΣ = Pi + Prcosφ = PIcosφ + PIIcos2φ + Prcosφ;
в горизонтальной плоскости
PигΣ = Prsinφ.
На поршень со стороны камеры сгорания действует сила от давления газов в цилиндре двигателя Рг. Она приложена в центре поршневого пальца и действует вдоль оси цилиндра.

Силы давления газов, действуя на поршень Рг и на крышку цилиндра — Рг, взаимоуравновешиваются внутри двигателя и на его опоры не передаются. Вне двигателя силы давления газов проявляются в виде вращающего Мвр и опрокидывающего моментов Mопр.
Относительное значение силы давления газов в зависимости от угла поворота кривошипа Pг = f(φ) определяется аналитически или графически по расчетной или действительной индикаторной диаграмме. При определении по индикаторной диаграмме в координатах р—V (рис. 11.5) на участке перемещения поршня от ВМТ до НМТ, в любом месте по высоте, проводим полуокружность радиусом r. Из центра О в сторону НМТ откладываем поправку Брикса
ОО1 = rλш/2, а из точки О1 как из центра, проводим лучи через принятое число градусов (на рис. 11.5 через 15° ПКВ) до пересечения с окружностью радиуса r. Проектируя полученные точки пересечения на ось V, получим давления, соответствующие этим углам поворота кривошипа. Отрезок по вертикали от оси V до индикаторной диаграммы будет соответствовать абсолютному давлению газов в цилиндре Рг, а отрезок между линией и индикаторной диаграммой — избыточному давлению Рг — Рo.
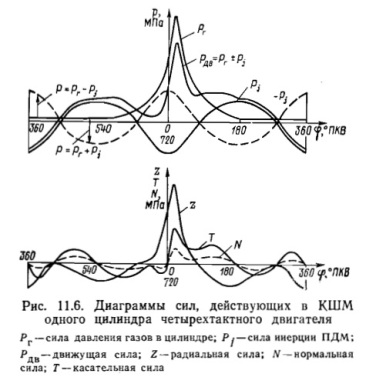
Силы, действующие на КШМ, переменны по величине и направлению, поэтому для удобства анализа их представляют в виде графических зависимостей (см. рис. 11.6), показывающих изменение сил по углу поворота кривошипа. Кривые периодические, с периодом 360° в двухтактных двигателях и 720° в четырехтактных. Силы считаются положительными, когда Рдв, Pi и Z направлены к центру вращения коленчатого вала, Т — направлена в сторону вращения коленчатого вала, а N — в сторону, противоположную вращению. Угол β положителен, когда шатун отклонен в сторону вращения коленчатого вала.
Основы кинематики кривошипно-шатунного механизма

Основы кинематики кривошипно-шатунного механизма
Основные кинематические соотношения
Основные кинематические соотношения
R — радиус кривошипа;
L — длина шатуна
λ = RL — постоянная механизма
λ для ВОД — от 1/4 до 1/3,5
для СОД и МОД — от 1/5 до 1/4
для длинноходовых МОД – 1/2.2
α – угол поворота кривошипа
в ВМТ α = 0°
S – путь проходимый поршнем
S = R(1- cosα + λ/2sin2α)
Основные кинематические соотношения
Основные кинематические соотношения
С — скорость поршня [м/с]
С = Rω ( sin α + λ/2 sin 2α) ,
где ω =πn/30 – угловая скорость
кривошипа
Среднее значение скорости
за один оборот
Cm = 2Sn / 60 = Sn / 30 м/с
α — ускорение поршня, м/с2
α = Rω2(cosα +λcos2α)
Максимальные значения ускорение
приобретает в мертвых точках поршня
Силы, действующие в КШМ во время работы двигателя давления газов в цилиндре (
Силы, действующие в КШМ во время работы двигателя
давления газов в цилиндре (РГ),
сил инерции поступательно движущихся масс механизма движения (Рj),
массы шатунно-поршневой группы (Pм),
атмосферного давления на поршень со стороны картера (Ратм) и
давления наддувочного воздуха в подпоршневой полости цилиндра (Рпп),
трения в звеньях механизма (Ртр).
Сила давления газов Рг приложена к поршню и действует вдоль оси цилиндра
1.Сила давления газов Рг
приложена к поршню и действует вдоль оси цилиндра. Давление газов рг = Рг/F переменно по значению, закон его изменения определяется из индикаторной диаграммы, перестроенной с применением метода А.Ф. Брикса из координат давление-ход поршня в координаты давление — угол поворота кривошипа
К перестроению индикаторной диаграммы из координат p-v в координаты р-α°п
К перестроению индикаторной диаграммы из координат p-v в координаты р-α°п.к.в
провести полуокружность радиусом R= S/2 из точки О
отложим в масштабе чертежа поправку Брикса, OO1 = R2 /2L , где L — длина шатуна.
из точки О1 проведем полуокружность произвольного радиуса. Разделим ее на любое число равных частей (обычно одно деление принимается равным 10 или 15°.
Из точки О1 через точки деления проведем лучи до пересечения с полуокружностью радиуса R.
Проекции точек пересечения на ось абсцисс определяют пути поршня, соответствующие углам поворота кривошипа. Проведя через эти точки вертикали до пересечения с контурами индикаторной диаграммы, найдем значения сил давления газов (рх) соответствующие углам поворота коленчатого вала.
Полученные данные используются для построения развернутой индикаторной диаграммы в функции угла п.к.в. Длина диаграммы должна соответствовать 720° для 4-х тактных двигателей и 360° для 2-х тактных.
Сила инерция поступательно движущихся масс
2.Сила инерция поступательно движущихся масс
РJ = -Мпа
где Мп = Gп /g масса поступательно движущихся частей, кг;
Gп = Gпор + Gшп + GKP .,
где Gшп≈ 0.4 Gш — часть веса шатуна, участвующая в поступательном движении.
тп = Мп/ Fп. — масса, отнесенная к площади поршня
Pj = — т п Rω2 ( cos а + λcos2a)
Pj = — тп Rω2 ( cos а + λcos2a)
Задаваясь рядом значений α, можно определить мгновенные значения силы инерции и по ним построить кривую сил инерции.
Суммарная сила представляет собой алгебраическую сумму сил действия газов
Суммарная сила
представляет собой алгебраическую сумму сил действия газов РГ и инерции поступательно движущихся масс Pj. Она может быть разложена на две составляющие силу, действующую по оси шатуна, Рш=P/cosβ, и силу, перпендикулярную оси цилиндра, N = Р / tgβ.
Нормальная сила N Если принять tgβ = sinβ ввиду малости угла и, поскольку sinβ = λsinα (из рассмотрения треугольников
Нормальная сила N
Если принять tgβ = sinβ ввиду малости угла и, поскольку sinβ = λsinα (из рассмотрения треугольников CAB и ОБА), то N = Рλsinα.
Сила N прижимает тронковую часть поршня к стенке цилиндра (в тронковом двигателе) или ползун крейцкопфа к его направляющей (в крейцкопфном двигателе). Сила переменна по направлению, этим объясняется происходящая при работе двигателя перекладка поршня и ползуна крейцкопфа с борта на борт.
Тангенциальная Т и радиальная Z силы
Тангенциальная Т и радиальная Z силы
Сила Рш , действующая по оси шатуна, сжимает его стержень. Перенесем силу Рш по линии ее действия в центр кривошипной шейки (точка А) и разложим ее на две составляющие:
тангенциальную силу, касательную к окружности, описанной радиусом R,
и радиальную силу, направленную по радиусу кривошипа
Тангенциальная Т и радиальная Z силы тангенциальную силу, касательную к окружности, описанной радиусом
Тангенциальная Т и радиальная Z силы
тангенциальную силу, касательную к окружности, описанной радиусом R,
и радиальную силу, направленную по радиусу кривошипа
Кривые сил: нормальной N , радиальной
Кривые сил: нормальной N, радиальной Z и тангенциальных T и ТΣ для 2-х тактного двигателя
Нормальная, радиальная и тангенциальная силы непостоянны и в пределах каждого рабочего цикла принимают как положительные, так и отрицательные значения. Отсюда переменны и вызываемые ими нагрузки в элементах конструкции двигателей.
Нормальная, радиальная и тангенциальная силы непостоянны и в пределах каждого рабочего цикла принимают как положительные, так и отрицательные значения
Нормальная, радиальная и тангенциальная силы непостоянны и в пределах каждого рабочего цикла принимают как положительные, так и отрицательные значения. Отсюда переменны и вызываемые ими нагрузки в элементах конструкции двигателей.
Крутящий момент М ц Р ш «=Р ш ’=Р ш =Р/cosβ
Крутящий момент Мц
Рш«=Рш’=Рш=Р/cosβ
Р»=P«ш cosβ=(Р/cosβ)cosβ =Р
N» = Р»ш sinβ =(Р/cosβ)sinβ= =Ptgβ = N
sinβ ≈ tgβ
Кривые сил N , Z и T и ТΣ для 2-х тактного двигателя
Кривые сил N, Z и T и ТΣ для 2-х тактного двигателя
Опрокидывающий момент Р ш «=Р ш ’=Р ш =Р/cosβ
Опрокидывающий момент
Рш«=Рш’=Рш=Р/cosβ
Р»=P«шcosβ=(Р/cosβ)cosβ =Р
N»=Р»ш sinβ=(Р/cosβ)sinβ =Ptgβ =N
sinβ ≈ tgβ
Monp=-NFпH
Мопр=-Мц
Реактивный момент МR MR = R1,2lФ =
Реактивный момент МR
MR = R1,2lФ =Мопр откуда
R1,2 = Мопр/lф
фундамент двигателя испытывает действие периодически меняющейся силы инерции поступательно движущихся масс, воспринимает переменный опрокидывающий момент и нагружается весом двигателя.
Суммарный крутящий момент M M=TΣF п
Суммарный крутящий момент M
M=TΣFпR
Для нахождения усилия TΣ необходимо суммировать через 10-15° значения сил Т всех цилиндров. На основе полученных данных строят кривую TΣ =f(α).
Mcp = TcpFПR
Вопросы Что является основными конструктивными параметрами
Вопросы
Что является основными конструктивными параметрами КШМ?
При каком положении поршня его скорость максимальна?
Чему равна минимальная скорость поршня?
В каком положении поршня его ускорение достигает максимального значения?
Действию каких сил подвергается кривошипно-шатунный механизм во время работы двигателя?
Какое действие испытывает фундамент двигателя?