

Первая партия в 1000 штук была продана за минуту!

Робот Пеппер. Фото www.aldebaran.com
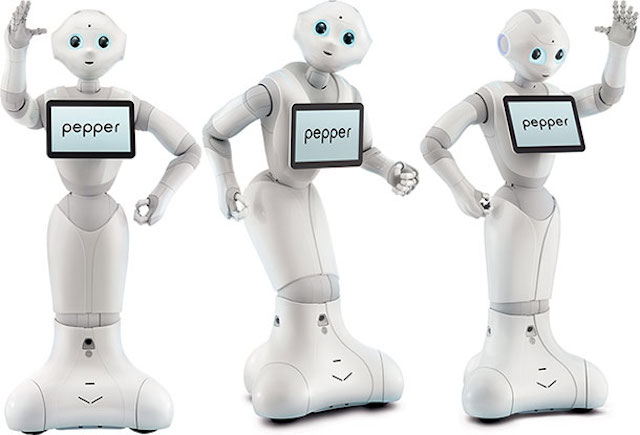
Робот Пеппер (Pepper) — человекоподобный робот, у него есть голова, две руки, он может перемещаться в пространстве.
Это социальный робот, который может стать другом своему владельцу. Он не умеет прибираться в квартире или готовить на кухне, но зато поддержит несложный разговор и выполнит простейшие поручения. Если вы рассмеялись, он будет знать, что вы в хорошем настроении. Если вы хмуритесь — Пеппер поймет, что что-то беспокоит вас.
Робот знает такие эмоции как радость, удивление, гнев, сомнения и грусть. Он способен анализировать выражение лица, язык тела и слова человека. На основе этого он угадывает настроение и адаптируется к нему. Например, он будет пытаться развеселить вас, играя любимую песню!

Робот Пеппер. Фото www.aldebaran.com
Робот разработан в Японии компанией Aldebaran Robotics (другая их известная разработка — робот NAO, который уже давно в свободной продаже) по заказу SoftBank Mobile — крупнейшего японского оператора мобильной связи. На сайте SoftBank Mobile и стартовали продажи робота сегодня утром.
Стоимость одного такого робота составляет около 1,8 тысячи долларов, с с программным обеспечением и обслуживанием — около 8 тысяч долларов.
Следующая партия поступит в продажу в июле.

Робот Пеппер. Фото www.aldebaran.com
Социальные роботы
Социальные роботы — это устройства, которые способны в автономном или полуавтономном режиме взаимодействовать и общаться с людьми дома или в общественных местах (школах, вокзалах, аэропортах, магазинах, просто на улице). Это всевозможные роботы-няни, роботы-сиделки, дворецкие, роботы телеприсутствия (например, R.Bot, Promobot), роботы-учителя (андроид Пушкин), роботы-помощники. Такие роботы имеют, как правило, форму гуманоида, умеют распознавать речь и реагировать на человека.
Один из интересных представителей это класса — робот Джимми от Intel, которого можно распечатать на 3d-принтере.

Jimmy и его идеолог Брайн Дэвид Джонсон. Фото www.parentesis.com
Несмотря на растущую популярность социальных роботов, исследования показывают, что старшее поколение до сих пор опасается роботов и их влияния на будущее детей.
А что у нас
Из российских разработок аналогом Пеппера является Промобот, созданный в Перми, а сейчас являющийся резидентом Сколково. У Промобота тоже есть голова, две руки, он умеет распознавать лица и поддержать несложный разговор.

Промобот на выставке в Сколково, фото Занимательная робототехника
Теги: Aldebaran Robotics, headline, NAO, Pepper, бытовые роботы, гуманоиды, новости, Промобот, социальный робот, философия, человекоподобный робот, Япония
From Wikipedia, the free encyclopedia

Robocup, 2016 |
|
| Manufacturer | SoftBank Robotics (previously Aldebaran Robotics) |
|---|---|
| Country | France |
| Year of creation | 2008 (first public version) |
| Type | Humanoid robot |
| Purpose | Research, education and entertainment |

Nao (pronounced now) is an autonomous, programmable humanoid robot formerly developed by Aldebaran Robotics, a French robotics company headquartered in Paris, which was acquired by SoftBank Group in 2015 and rebranded as SoftBank Robotics. The robot’s development began with the launch of Project Nao in 2004. On 15 August 2007, Nao replaced Sony’s robot dog Aibo as the robot used in the RoboCup Standard Platform League (SPL), an international robot soccer competition.[1] The Nao was used in RoboCup 2008 and 2009, and the NaoV3R was chosen as the platform for the SPL at RoboCup 2010.[2]
Several versions of the robot have been released since 2008. The Nao Academics Edition was developed for universities and laboratories for research and education purposes. It was released to institutions in 2008, and was made publicly available by 2011. Various upgrades to the Nao platform have since been released, including the 2011 Nao Next Gen and the 2014 Nao Evolution.[3][4]
Nao robots have been used for research and education purposes in numerous academic institutions worldwide. As of 2015, over 5,000 Nao units are in use in more than 50 countries.[4]
Development history[edit]
Aldebaran Robotics was established in 2005 by Bruno Maisonnier, who had previously begun developing the robot under «Project Nao» in 2004.[4] Six prototypes of Nao were designed between 2005 and 2007. In March 2008, the first production version of the robot, the Nao RoboCup Edition, was released to the contestants of that year’s RoboCup.[5] The Nao Academics Edition was released to universities, educational institutions and research laboratories in late 2008.
In the summer of 2010, Nao made global headlines with a synchronized dance routine at the Shanghai Expo in China.[6] In October 2010, the University of Tokyo purchased 30 Nao robots for their Nakamura Lab, with hopes of developing the robots into active laboratory assistants.[7] In December 2010, a Nao robot was demonstrated doing a stand-up comedy routine,[8] and a new version of the robot was released, featuring sculpted arms and improved motors. In May 2011, Aldebaran announced that it would release Nao’s controlling source code to the public as open source software.[9] In June 2011, Aldebaran raised US$13 million in a round of venture funding led by Intel Capital.[10] In 2013, Aldebaran was acquired by Japan’s SoftBank Mobile for US$100 million.[11]
In December 2011, Aldebaran released the Nao Next Gen, featuring hardware and software enhancements such as high density cameras, improved robustness, anti-collision systems and a faster walking speed.[3] The Nao Evolution, featuring enhanced durability, improved multilingual speech synthesis, improved shape and facial detection and recognition using new algorithms, and improved sound source location using four directional microphones, was released in June 2014.[4]
Aldeberan Robotics was acquired by SoftBank Group in 2015 and rebranded as SoftBank Robotics.
Academic and scientific usage[edit]
Since 2011, over 200 academic institutions worldwide have made use of the robot, including the University of Hertfordshire and their Bold Hearts RoboCup Team, the Indian Institute of Information Technology, Allahabad, the University of Tokyo,[7] the Indian Institute of Technology Kanpur,[12] Saudi Arabia’s King Fahd University of Petroleum and Minerals, University of South Wales and Montana State University.[13][14] In 2012, donated Nao robots were used to teach autistic children in a UK school; some of the children found the childlike, expressive robots more relatable than human beings.[15][16] In a broader context, Nao robots have been used by numerous British schools to introduce children to robots and the robotics industry.[17]
By the end of 2014, over 5,000 Nao robots were in use with educational and research institutions in 70 countries.[4] In 2015, Mitsubishi UFJ Financial Group began trialling Nao robots for customer service use in its Japanese bank branches.[18] In July 2015, Nao robots were shown to demonstrate a basic form of self-awareness in a philosophical experiment at Rensselaer Polytechnic Institute in New York, in which three robots were set up, muting two of them; they were then told that two of them had been given a «dumbing pill», and asked to figure out which of them hadn’t. After initially replying he didn’t know, the non-muted robot was able to figure out he hadn’t been given the dumbing pill after hearing the sound of his own voice.[19] In September 2015, the French Institute of Health and Medical Research used Nao robots to test a system of robotic «autobiographical memory» designed to help train International Space Station crews and assist elderly patients.[20]
Nao is available as a research robot for schools, colleges and universities to teach programming and conduct research into human-robot interactions.[21]
In August 2018, RobotLAB released an online learning platform for schools that enhance the use of NAO for STEM, Coding and Engineering.[22]
Healthcare usage[edit]
Since its release in 2004, Nao has been tested and deployed in a number of healthcare scenarios, including usage in care homes[23] and in schools.
Design[edit]
The various versions of the Nao robotics platform feature either 2, 14, 21 or 25 degrees of freedom (DoF). A specialised model with 21 DoF and no actuated hands was created for the Robocup competition. All Nao Academics versions feature an inertial measurement unit with accelerometer, gyrometer and four ultrasonic sensors that provide Nao with stability and positioning within space. The legged versions included eight force-sensing resistors and two bumpers. The 2014 Nao Evolution, featured stronger metallic joints, improved grip and an enhanced sound source location system that utilises four directional microphones.[4] The most recent version, dubbed NAO6, was introduced in June 2018.[24][25]
Software[edit]
The Nao robot is controlled by a specialised Linux-based operating system, dubbed NAOqi.[4] The OS powers the robot’s multimedia system, which includes four microphones (for voice recognition and sound localization), two speakers (for multilingual text-to-speech synthesis) and two HD cameras (for computer vision, including facial and shape recognition). The robot also comes with a software suite that includes a graphical programming tool dubbed Choregraphe,[26] a simulation software package and a software developer’s kit. Nao is furthermore compatible with the Microsoft Robotics Studio, Cyberbotics Webots, and the Gostai Studio (URBI).[27]
In August 2018, RobotLAB released Engage! K12. It is an online learning platform for schools that enhance the use of NAO for STEM, Coding and Engineering.[22] In February 2018, Finnish company Utelias Technologies released Elias Robot, a learning application that helps to learn languages with NAO.[28]
Specifications[edit]
| Robot Version | Nao V3+ (2008) | Nao V3.2 (2009) | Nao V3.3 (2010) | Nao Next Gen (V4) (2011)[29] | Nao Evolution (V5) (2014)[30] | Nao Power 6 (V6) (2018)[31] |
|---|---|---|---|---|---|---|
| Height | 573.2 millimetres (22.57 in) | 573 millimetres (22.6 in) | 574 millimetres (22.6 in) | |||
| Depth | 290 millimetres (11 in) | 311 millimetres (12.2 in) | ||||
| Width | 273.3 millimetres (10.76 in) | 275 millimetres (10.8 in) | ||||
| Weight | 4.836 kilograms (10.66 lb) | 4.996 kilograms (11.01 lb) | 5.1825 kilograms (11.425 lb) | 5.305 kilograms (11.70 lb) | 5.48 kilograms (12.1 lb) | |
| Power supply | lithium battery providing 27.6 Wh at 21.6V | lithium battery providing 48.6 Wh at 21.6V | lithium battery providing 62.5 Wh at 21.6V | |||
| Autonomy | 60 minutes (active use) | 90 minutes (active use) | ||||
| Degrees of freedom | 25[32] | |||||
| CPU | x86 AMD GEODE 500 MHz | Intel Atom Z530 @ 1.6 GHz | Intel Atom E3845 Quad Core @ 1.91 GHz | |||
| RAM | 256 MB | 1 GB | 4 GB DDR3 | |||
| Storage | 2 GB Flash memory | 2 GB Flash memory + 8 GB Micro SDHC | 32 GB SSD | |||
| Built-in OS | OpenNAO 1.6 (OpenEmbedded-based) | OpenNAO 1.8 (OpenEmbedded- based) | OpenNAO 1.10 (OpenEmbedded- based) | OpenNAO 1.12 (gentoo-based) | NAOqi 2.1 (gentoo-based) | NAOqi 2.8 (openembedded-based) |
| Compatible OS | Windows, Mac OS, Linux | |||||
| Programming languages | C++, Python, Java, MATLAB, Urbi, C, .Net | |||||
| Simulation environment | Webots | |||||
| Cameras | Two OV7670 58°DFOV cameras | Two MT9M114 72.6°DFOV cameras | Two HD OV5640 67.4°DFOV cameras | |||
| Sensors | 36 MRE (Magnetic Rotary Encoders) using Hall-effect sensor technology.12 bit precision, ie 4096 values per turn corresponding to about 0.1° precision
2 x gyrometer 1 axis 1 x accelerometer 3 axis 8 x FSR Force (Sensitive Resistors). 2 x bumpers located at the tip of each foot. These are simple ON/OFF switches. There is no difference between a push on the left or right foot. Sonar: 2 emitters, 2 receivers. 2 x I/R. 4 microphones: 2 x Camera: Capacitive sensor |
36 x MRE (Magnetic Rotary Encoders) using Hall-effect sensor technology.12 bit precision, ie 4096 values per turn corresponding to about 0.1° precision
2 x gyrometer 1 axis 1 x accelerometer 3 axis 8 x FSR (Force Sensitive Resistors). 2 x bumpers located at the tip of each foot. These are simple ON/OFF switches. There is no difference between a push on the left or right foot. Sonar: 2 emitters, 2 receivers. 2 x I/R. 4 microphones: 2 x Camera: Capacitive sensor |
36 x MRE (Magnetic Rotary Encoders) using Hall-effect sensor technology.12 bit precision, ie 4096 values per turn corresponding to about 0.1° precision
a 3-axis gyrometer a 3-axis accelerometer 8 x FSR (Force Sensitive Resistors). 2 x bumpers located at the tip of each foot. These are simple ON/OFF switches. There is no difference between a push on the left or right foot. Sonar: 2 emitters, 2 receivers. 2 x I/R. Microphones x4 on the head 2 x Camera: Capacitive sensor |
36 x MRE (Magnetic Rotary Encoders) using Hall-effect sensor technology.12 bit precision, ie 4096 values per turn corresponding to about 0.1° precision
a 3-axis gyrometer a 3-axis accelerometer 8 x FSR (Force Sensitive Resistors). 2 x bumpers located at the tip of each foot. These are simple ON/OFF switches. There is no difference between a push on the left or right foot. Sonar: 2 emitters, 2 receivers. Frequency: 40 kHz Resolution: 1 cm-4 cm (depending on distance) Detection range: 0.20 m — 3 m Effective cone: 60° 2 x I/R. Wavelength = 940 nm. Emission angle = +/- 60°. Power =8 mW/sr 4 omnidirectional Microphones.Specification. Sensitivity : 250mV/Pa +/-3 dB at 1 kHz 2 x Camera: Specifications Capacitive sensor |
||
| Connectivity | Ethernet, Wi-Fi IEEE 802.11 a/b/g | Ethernet, Wi-Fi IEEE 802.11 a/b/g/n |
See also[edit]
- Aldebaran Robotics (French Wikipedia)
- Educational robotics
[edit]
- Romeo (French Wikipedia)
- Pepper (robot)
Robots of comparable role, configuration, dimensions and era[edit]
- Atlas (robot)
- Kirobo
- Manav (robot)
- ICub
- InMoov
- QRIO
- REEM
- Robotis Bioloid
References[edit]
- ^ «Nao robot replaces AIBO in RoboCup Standard Platform League». Engadget. 16 August 2007. Retrieved 4 October 2012.
- ^ «UK robots prepare for world cup». BBC. 25 October 2010. Retrieved 4 October 2012.
- ^ a b «Aldebaran Robotics announces Nao Next Gen humanoid robot». Engadget. 10 December 2011. Retrieved 15 April 2012.
- ^ a b c d e f g «Unveiling of NAO Evolution: a stronger robot and a more comprehensive operating system». Aldebaran Robotics. 2014. Archived from the original on 1 February 2015. Retrieved 1 February 2015.
- ^ «RoboCup Standard Platform League». Tzi.de. Retrieved 4 October 2012.
- ^ «Robotic mascot entertains at Shanghai Expo» Archived 21 October 2012 at the Wayback Machine. ChannelNewsAsia.com. 21 June 2010. Retrieved 4 October 2012.
- ^ a b «Le robot français Nao fait ses classes à l’Université de Tokyo» Archived 21 October 2010 at the Wayback Machine (in French). L’Express. Retrieved 4 October 2012.
- ^ «Heather Knight: Silicon-based comedy». TED. December 2010. Retrieved 4 October 2012.
- ^ «Aldebaran to Open Source NAO’s code» Archived 24 July 2012 at the Wayback Machine. Nao Developer. 13 May 2011. Retrieved 4 October 2012.
- ^ «Aldebaran raises $13 million in round led by Intel Capital» Archived 15 November 2012 at the Wayback Machine. Aldebaran Robotics. 2011. Retrieved 4 October 2012.
- ^ «The Sad Story of Softbank’s Aldebaran Robotics and its Emotionally Intelligent Robot». RudeBaguette.com. 15 December 2012. Retrieved 4 February 2015.
- ^ «Robot that walks, talks, emotes like humans…’Nao’«. The Times of India. 4 February 2013. Archived from the original on 9 November 2013. Retrieved 8 February 2013.
- ^ Nash, Audrow (23 January 2015). «Robots: Looney the Robot». RobotsPodcast.com. Retrieved 10 February 2015.
- ^ «Nao, le robot que les universités s’arrachent» (in French). DigiSchool Média. 4 February 2013. Archived from the original on 1 February 2014. Retrieved 16 February 2013.
- ^ «Robots in the classroom help autistic children learn». BBC. 8 November 2012. Retrieved 9 November 2012.
- ^ «AskNAO». Aldebaran Robotics. Archived from the original on 5 February 2015. Retrieved 1 February 2015.
- ^ «Robots found in the classroom». Active-Robots.com. 12 September 2014. Retrieved 1 February 2015.
- ^ «Japanese bank introduces robot workers to deal with customers in branches». The Guardian. 4 February 2015. Retrieved 4 February 2015.
- ^ «Polite robots show glimmer of self-awareness». Popular Science. 16 July 2015. Retrieved 23 December 2015.
- ^ «‘Autobiographical memory’ lets robots act as knowledge go-betweens for ISS crews». Gizmag.com. 8 September 2015. Retrieved 16 September 2015.
- ^ «For education & research». SoftBank Robotics. Retrieved 30 September 2016.
- ^ a b «Launch of Engage! K12». Markets Insider. Retrieved 6 August 2018.
- ^ «‘What about that human touch?’ Elderly will be cared for by ROBOTS to solve staff shortage». 13 May 2018.
- ^ «NAO6 Press Kit .PDF». SoftBank Robotics. Announced June 21, 2018.
- ^ «MODEL: H25600 Specifications .PDF». SoftBank Robotics. Announced June 21, 2018
- ^ Choregraphe User Guide. Aldebaran Robotics. Retrieved 1 February 2015.
- ^ «NAO NEXT Gen H25 Datasheet». Aldebaran Robotics. December 2011. Retrieved 4 October 2012.
- ^ «Techno Teachers». Reuters. 27 March 2018.
- ^ «NAO Technical overview — NAO Software 1.14.5 documentation». doc.aldebaran.com. Retrieved 21 May 2019.
- ^ «NAO — Construction — Aldebaran 2.1.4.13 documentation». doc.aldebaran.com. Retrieved 21 May 2019.
- ^ «NAO Power V6 Standard Edition». RobotLAB. 2018. Retrieved 1 August 2018.
- ^ «NAO degrees of freedom (3D animation)». Retrieved 18 May 2018.
External links[edit]
![]()
Wikimedia Commons has media related to Nao.
- Aldebaran Robotics official website and YouTube channel
- «My day with a robot». BBC News. 15 September 2015.
- Blanca Li dance performance with Nao robot (World Science Festival)
- Barboza Space Center (The Occupy Mars Learning Adventures Projects with Nao) www.BarbozaSpaceCenter.com
http://roboting.ru/1905-chelovekopodobnyy-robot-pepper.html

Французская робототехническая компания Aldebaran Robotics работала в тайне в течение двух лет, чтобы создать человекоподобного «дружелюбного» робота Pepper («Перец») для общения. «Наиболее важная миссия роботов – быть добрыми и эмоциональными компаньонами, чтобы облегчить нашу повседневную жизнь, принести счастье, удивить нас, помочь людям взрослеть», считает основатель Альдебарана и генеральный директор Бруно Мэйсоньер, руководитель, который оставил карьеру в финансах, чтобы воплотить свою мечту о создании роботов для всех.
Теперь японский телекоммуникационный гигант SoftBank готов продавать робота потребителям. Однако, не все убеждены, что люди захотят купить «Перец» для дома. По крайней мере, они купят его тогда, когда робот может сделать какую-нибудь работу по дому. Другие обвинили SoftBank в «раздувании» возможностей Перца. Технологический веб-сайт «Грань» счёл навыки робота по распознанию эмоций неутешительными, говоря, что «у «Перца» есть мозг КОБОЛ (достаточно примитивная компьютерная программа)». Однако, руководитель компании Альдебаран говорит, что Перец будет становиться более и более способным, поскольку разработчики создают для него новые приложения. Пользователи тогда будут в состоянии загрузить и установить эти новые функциональности, так же, как они добавляют новые приложения к своим смартфонам. В то же время, недавно SoftBank и Альдебаран провели конференцию разработчиков в Токио, где они рассказали детали о технологии и разработке программного обеспечения для Перца. Из тысячи присутствующих на конференции нашлось 600-т, которые оформили предварительный заказ на робота.
Робот кажется полным решимости рассмешить своего пользователя и компаньона-человека. «Вы улыбаетесь от всей души?» спрашивает робот. Человек хихикает. «Это — то, о чем я говорю», язвительно замечает робот высоким голосом. Затем он наклоняет свою пластмассовую голову и приносит извинения за то, что это было сказано «слишком властным тоном генерального директора компании». А имеется в виду Генеральный директор Мэсайоши Сон (Masayoshi Son), основатель и председатель телекоммуникационного гиганта SoftBank, самый богатый человек в Японии.
Мэсайоши Сон наблюдал за развитием сотен новых продуктов как часть продукции обширного конгломерата интернет-предприятий и компаний СМИ. Но недавно на пресс-конференции за пределами Токио Сон поднялся на сцену и представил любимый проект: человекоподобный робот под названием Pepper (Перец). Разработанный для того, чтобы быть компаньоном для человека в общении, он — первый в мире полномасштабный гуманоид, который будет предлагаться потребителям. В феврале SoftBank планирует начать продавать его в Японии за 198,000 иен (меньше чем за 2,000 долларов США).
За такие деньги потребитель не получит ничего «сверхъестественного». Он получит двурукого робота высотой 1.2 метра, который ездит по полу на колесной основе. Он может танцевать и жестикулировать с некоторым изяществом. Но его навыки и манипуляции ограничены. И неясно, сколько автономии (способности самостоятельно выполнять нужные потребителю действия) робот имеет. Во время эксплуатации в домашних условиях робот вряд ли сможет убрать постель или очистить обеденный стол.
Директор по маркетингу компании Лаура Бокобза объясняет потенциал и возможности Пеппера
http://www.youtube.com/watch?v=lqlyxg1-gE0
И можно согласиться с SoftBank в том, что Перец не помощник по хозяйству. Он разработан, чтобы составить человеку компанию, шутить, играть в игры, помогать общаться с семьей и друзьями. Робот говорит на японском языке, но он может бегло говорить на английском, французском и испанском языках. Чтобы делать все это, робот оборудован «двигателем эмоций». Это — программное обеспечение, которое пытается определить, как пользователь чувствует себя, на основании выражения лица, тоне голоса и речи пользователя, что позволяет роботу ответить соответственно. Если пользователь прибудет домой и будет не в настроении (опущенный вниз взгляд) то робот будет играть подходящую по мнению робота песню, например. «Мы хотим, чтоб у нас был робот, который «максимизирует» радость и «минимизирует» печаль». Компания SoftBank держит пари, что люди «созрели» для такого общения.
Кажется естественным, что Япония (страна известная своей любовью ко всему автоматизированному), была бы первым рынком для домашнего робота-гуманоида. Но может оказаться неожиданностью, что компания SoftBank искала партнеров для создания, робота Pepper не вместе с Хондой, Сони, Тойотой или любой другой крупной японской компанией. Вместо этого SoftBank обратилась к намного меньшей и менее известной французской робототехнической компании под названием Альдебаран.
Узкая усаженная деревьями улица на юго-западной окраине Парижа. Главный офис Альдебарана занимает несколько этажей современного офисного здания. Роботы и люди смешиваются друг с другом внутри как будто в сценах из фильма «Звездные войны». Одни роботы Pepper приветствует сотрудников около кофеварки. Другие в светлых париках наблюдают за людьми, входящими в прихожую офиса. В комнате со стеклянными стенами дюжина роботов бесцельно бродит и говорит. Человек приближается к одному из роботов и начинает разговор. Но робот, кажется, не понимает то, что ему говорят. Сотрудник компании подходит и даёт команду роботу говорить на английском языке. Теперь робот и автор могут понять друг друга. Когда автор спросил робота, что умеет делать, робот отвечает, описывая игру, в которую он хочет играть. Сотрудник показывает как улучшить навыки взаимодействия с роботом: нужно смотреть на лицо робот и говорить более внятно. Автор спрашивает снова, что робот может сделать. «Я могу сделать много вещей», отвечает робот «потому что инженеры, которые запрограммировали меня, очень умны». Компания SoftBank, кажется, согласна с утверждением робота. Четыре года назад Мэсайоши Сон решил, что хочет, чтобы робототехника была частью его обширной деловой империи. И он послал эмиссаров, чтобы оценить лучшие робототехнические компании в мире. Альдебаран, несмотря на то, чтобы был относительно маленькой компанией, выделился своей способностью проектировать роботы, которые предлагают очень интерактивные навыки общения.
Компания SoftBank дала компании Альдебаран всего три месяца на изготовление первого прототип, и после этого это потребовала каждые два или три месяца проводить демонстрации робота. Стратегия Альдебарана состояла в том, чтобы основываться на опыте разработки своего робота Nao. Директор по научно-исследовательской работе компании Альдебаран, говорит, что инженеры приспособили механизмы в руках Nao для использования в «Перце». Он поясняет: «Наши роботы имеют много общих черт. И это позволило нам сделать многие вещи в короткий период времени».
Команда проектировщиков и художников создала гладкие пустотелые (и «дружественно» выглядящие) тело и голову робота. Техническая команда наполнила тело 20 электродвигателями, компьютером, двумя камерами, 3D датчиком, четырьмя микрофонами и литий-ионным аккумулятором, который позволяет «Перцу» работать в течение 12 часов. «Таблетка» на груди робота показывает информацию и обеспечивает другой (не речевой и не при помощи мимики) способ взаимодействия с роботом. Один из директоров программного обеспечения, говорят, что была сложная задача, связанная с огромными вычислительными потребностями робота, «удостовериться, что центральный процессор не взрывается». Каждой функцией робота управляет один приблизительно из 20 «двигателей» (программных блоков) программного обеспечения. Если пользователь стоит далеко от робота, то его «двигатель осведомленности» заставляет робота двигать головой и испускать звуки, чтобы попытаться привлечь внимание. Если пользователь подходит ближе, начинает работать «двигатель диалога». Теперь пользователь и «Перец» могут разговаривать. Если пользователь просит, чтобы робот танцевал, вступает в действие «двигатель движения».
Особое место занимает «двигатель эмоций». Он использует систему машинного зрения робота, чтобы распознать улыбки, хмурые взгляды или удивление, и он использует технологию распознавания речи, чтобы ощутить тон голоса и распознать определенные слова, такие как «любовь» или «ненависть». «Двигатель эмоций» тогда проводит численную оценку эмоций и определяет количество полной эмоции человека, как положительной или отрицательной. Альдебаран признаёт, что эта система ещё не совершенна, но компания обещает улучшить её. В будущем система могла бы также включить в себя этику, сочувствие, и другие модели поведения человека.
В то время как Альдебаран продолжает работать над тем, чтобы сделать существующие роботы Pepper более умными и более способными, компания не планирует на этом остановливаться. С опытом, полученным при улучшении Перца, компания хочет при поддержке SoftBank создать новые роботы для других клиентов. Альдебаран еще не знает то, на что они будут похожи, эти «кузены» Перца. Прорабатываются бизнес-идеи с банками, страховыми компаниями и розничными магазинами.
А теперь «взглянем на будущее» роботов для дома глазами генерального директора компании Альдебаран.
К 2020г. Перец, кажется, станет первым новым типом домашних персональных роботов, разработанных для того, чтобы быть помощниками и компаньонами. За следующие пять лет станут доступными несколько других моделей. Одним из них скоро будет Jibo, «болтливый» робот размером с кофеварку, созданный компанией Synthia Breazel. Другой робот, который, вероятно, поступит в продажу до 2020 г. является более крупной и мобильной машиной, разработанной компанией Hoaloha Robotics, который предназначается для рынка здравоохранения. Мы верим, что Перец, Jibo, и робот Hoaloha будут интерактивными, выразительными роботами, которые будут общаться с пользователями через голос и сенсорные экраны. В дополнение к их встроенным функциональностям будут доступны и дополнительные приложения. Таким образом, с этим первым поколением домашних роботов, мы ждём появление сообщества разработчиков, сосредоточенных на разработке приложений для этих роботов. Эти приложения будут «вращаться» вокруг развлечений, общения и образования. Поэтому не ожидайте, что роботы будут заниматься работой по дому.
К 2025 г. и в течение следующих 10 лет более «личные» роботы (с различными размерами, возможностями и ценами) прибудут в наши дома, созданные признанными производителями роботов, крупными компаниями электроники и новыми начинающими компаниями робототехники. Но самое большое изменение будет в навыках видения и манипуляции роботов, которые будут значительно улучшены и позволят нашим «автоматизированным сожителям» выполнять некоторые полезные для нас задачи. Они всё ещё не будут в состоянии приготовить или убраться также, как и человек. Но они могли бы помочь нарезать некоторые овощи или поднять игрушки с пола. Это поколение роботов-помощников ещё будет медленным и несовершенным. Но они будут более умными, чем их предшественники. По крайней мере, когда они сломаются, они будут в состоянии сами вызывать себе службу технической поддержки.
Пробуждение робота Pepper
http://www.youtube.com/watch?v=8HXhsKpETXE
Pepper Tech Festival 2014
http://www.youtube.com/watch?v=XcJccQqTM6Q
Бруно Мэйсоньер дал интервью о своем роботе Pepper из Aldebaran Robotics
http://vk.cc/3VTWBP

После того, как японский телекоммуникационный гигант Softbank выкупил французскую компанию Aldebaran Robotics в 2012 году, мы почти перестали слышать её имя. Однако, компания продолжала и продолжает свою деятельность в развитии продвинутых гуманоидных роботов, демонстрируя высокий потенциал своих инженеров и технологий. В этой статье мы вспомним как же начинала свою деятельность Aldebaran Robotics, каких успехов достигла и с какими трудностями столкнулась на своем пути.
Начало работы: проект Nao
Aldebaran Robotics была основана в 2005 году в Париже инженером Бруно Мейсонье, который ранее еще в 2004 году начал работать над проектом «Nao». Первый состав компании наcчитывал до 15 человек. Это были в основном студенты технических учебных заведений Франции. Но до 2012 года компания расширила свой персонал до 140 человек.
Наиболее значимыми для компании стали первые годы (2005-2007), когда вышли первые шесть прототипов гуманоида Nao. Этот робот произвел, можно сказать, революцию в человекоподобных роботах, так как стал первой доступной платформой для создания продвинутых устройств, способных автономно выполнять различные действия. Каждый покупатель мог использовать Nao по своим предпочтениям – он и пел, и танцевал, и играл в футбол, и служил «няней» для малышей, а также исследовательской платформой для многих ученых, занимающихся взаимодействием людей и роботов.
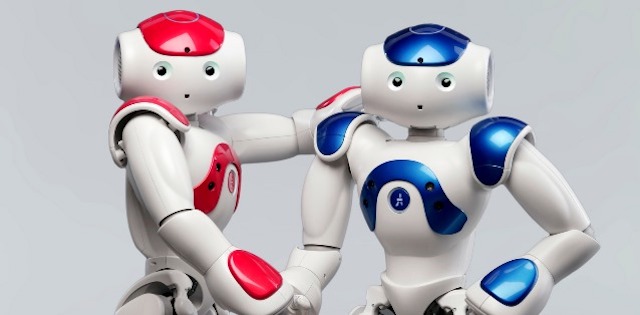
В марте 2008 года была выпущена первая серийная версия робота Nao RoboCup Edition, специально созданная для участников RoboCup. Затем вышла модель Nao Academic, предназначенная для работы в университетах, учебных заведениях и исследовательских лабораториях.
NAO вскоре начал использоваться в различных университетах всего мира, таких как Токийский университет, Индийский технологический институт Канпур в Индии, Alfaisal в Саудовской Аравии. В декабре 2011 года Aldebaran Robotics произвела модель Nao Next Gen с расширением программного обеспечения и более мощным процессором, а также с HD камерами.

Самая последняя версия робота Nao Evolution вышла в 2014 году и является самой популярной по сей день. Этот робот имеет улучшенную форму и технологию обнаружения лица с помощью новых алгоритмов, усовершенствованное расположение источника звука за счет четырех направленных микрофонов, систему обнаружения препятствий и оценки расстояния с дальностью обнаружения от 1 см до 3 м, а также новые системы телеметрии. Продаются Nao по цене около 10 тысяч долларов.
Видео робота Nao
2010 годы: робот Romeo
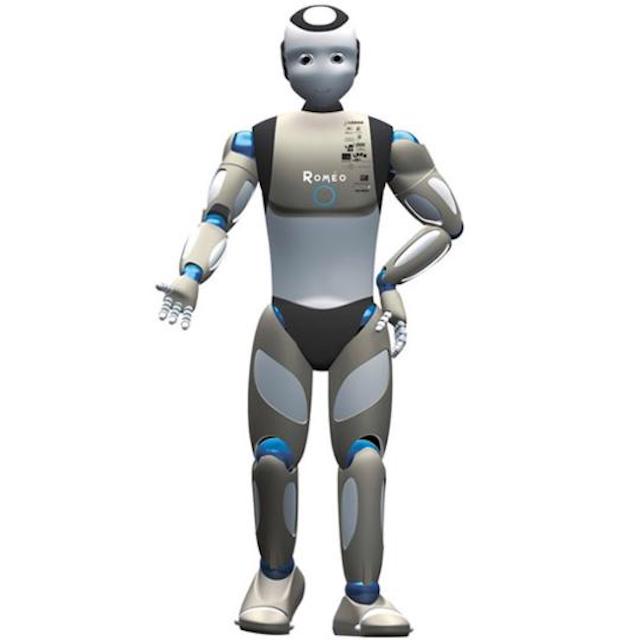
После успеха Nao Aldebaran решила еще больше сконцентрировать свою деятельность на гуманоидных роботах. И в 2012 году в сотрудничестве с Единым Межведомственным Фондом и Министерством экономики и финансов Франции она выпустила первый опытный образец нового робота, получившего название Romeo (хотя задумка этого аппарата была еще в 2009 году). Если Nao позиционировался больше как исследовательский проект, то Romeo был предназначен для практических задач и помощи человеку, в частности, престарелым и людям с ограниченными физическими возможностями.
Первые модели Romeo были проданы по цене около 300 тысяч долларов (!) нескольким французским и европейским учебным заведениям в качестве исследовательской платформы. Затем к 2014 году разработчики усовершенствовали робота, проработав над его дизайном, батареями и общей конструкцией. На данный момент Romeo помогает ученым изучать решения для предоставления помощи по дому или в специализированных структурах пожилым людям и инвалидам. Но на практике робот пока не был использован.
Поглощение Softbank
В 2012 году Aldebaran столкнулась с серьезными финансовыми проблемами. Весь фонд компании был растрачен на производство NAO и Romeo, а новые инвесторы не появлялись. В связи с этим Мейсонье объявил о продаже контрольного пакета акций. Претендентов на покупку было достаточно много, но в итоге, компания заключила сделку о продаже с японским телекоммуникационным холдингом Softbank. 80% акций были проданы на общую сумму $100 млн.
К слову, Softbank давно намеревался выйти на рынок робототехники и выжидал удобный случай. Поэтому покупка Aldebaran была осознанной и столь желанной. Сами же Aldebaran были рады такому исходу: команда осталась при своих местах и зарплатах. Активы разделились на две страны: Францию и Японию, поэтому особых изменений в деятельности Aldebaran не произошло. Единственное, что название компания теперь носит Softbank Robotics.
Последние годы: проект Pepper
Будучи уже в составе Softbank, Aldebaran поставила перед собой новую задачу: создать нового гуманоидного робота, который сможет стать коммерчески доступным и используемым в реальном мире. После двух лет напряженной работы проект воплотился в жизнь в лице крутого эмоционального робота Pepper.
Официально робот был представлен на Международной конференции Softbank по робототехнике в июне 2014 года. Аппарат ростом 120 см на колесной платформе способен выполнять разнообразные бытовые задачи, от домашнего помощника до сторожа помещения. Но главной особенностью является то, что это первый в мире персональный робот с эмоциями, способный обучаться самостоятельно новым действиям через простое общение с человеком в реальной среде. Благодаря машинному обучению и продвинутому ИИ робот изучает и запоминает поведение людей, пополняя свою базу знаний в облачной системе хранения информации.
Продажи робота стартовали в 2015 году по цене всего около 1 600 долларов. Первая партия из 1000 единиц была раскуплена всего за одну минуту. Робот стал работать в торговых центрах и офисах Японии, в частности, именно он приветствует гостей при входе в сетевые магазины Softbank.
С 2016 года робот вышел на европейский и американский рынки, и стал еще более широко распространенным, используясь как в практических целях, так и исследовательских.
Видео робота Pepper
После успешного появления робота Pepper, Aldebaran стала привлекать все больше инвесторов и спонсоров. В частности, Intel Capital, Foxconn и Alibaba инвестировали крупные суммы в подразделение робототехники, добавив к общему фонду компании целых $131 млн.
Неудачи и смена руководства
В феврале 2015 года появилась новость о том, что Бруно Мейсонье и Жан-Кристоф Бейли (главный научный руководитель Aldebaran) уходят из компании. Мейсонье якобы сообщал, что будет работать специальным советником Masayoshi Son, президента Softbank, но эта информация не была подтверждена.
Официальным мнением расформирования компании являются разногласия между руководством Softbank и Aldebaran. В этом же году должна была выйти обновленная версия Pepper. Но из-за ряда причин её выход был задержан почти на год. Во-первых, это было связано с тем, что производитель получил большой заказ на роботов и просто не успевал со сроками поставок. Во-вторых, Softbank заключили сотрудничество с компанией IBM Watson для оснащения Pepper «супермозгом», а это оказалось непросто. И в-третьих, смена руководства также повлияла на сроки выпуска обновленной версии робота.
Но, как бы там ни было, новый Pepper с прошивкой Watson все же вышел в начале 2016 года и доступен сейчас для покупки или аренды по цене $2000. Новый мозг Pepper позволяет ему «думать» практически как человек, что делает его более дееспособным и адаптируемым к человеческой среде.
В настоящее время Aldebaran руководит талантливый ученый Фумихиде Томидзава (Fumihide Tomizawa), который работал в Softbank с 2000 года в качестве главного инженера и финансового аналитика. Компания продолжает работу над основными проектами Nao, Romeo и Pepper, а также другими программными платформами для исследований и бизнеса.
Это была история развития компании робототехники Aldebaran Robotics, которая оказалась весьма интересной и отличилась значимыми проектами. Следите за нашими обновлениями и ждите больше интересных статей из мира робототехники.

Робот в РГГУ
NAO (название произносится как now) — это автономный программируемый человекоподобный робот, разработанный компанией Aldebaran Robotics, штаб-квартира которой находится во Франции (Париж). Разработка робота началась с запуска Проекта NAO (Project NAO) в 2004 году. 15 августа 2007 года, робот NAO заменил робота-собаку Aibo компании Sony в международном соревновании по робофутболу RoboCup Standard Platform League (SPL). Также робот NAO принимал участие в соревновании RoboCup 2008 и 2009 года и был выбран в качестве базовой платформы для SPL на RoboCup 2010.
Учебная версия NAO была разработана для университетов и лабораторий для исследования и обучения. Для институтов эта версия была реализована в 2008, а позднее (к 2011) стала доступна для большинства. NAO вскоре начал использоваться в различных университетах всего мира, таких как Токийский университет, Индийский технологический институт Канпур (англ.) в Индии, Alfaisal в Саудовской Аравии. В декабре 2011 года Aldebaran Robotics произвела модель Nao Next Gen с расширением программного обеспечения и более мощным процессором, а также с камерами более высокого разрешения (HD)
Энциклопедичный YouTube
-
1/3
Просмотров:
26 918 329
8 628 952
16 350 128
-
Atlas, The Next Generation
Технические характеристики
| Nao Next Gen (2011) | |
|---|---|
| Рост | 58 см |
| Вес | 4.3 кг |
| Время автономной работы | 60 минут (активной работы), 90 минут (в обычном режиме) |
| Степени свободы | от 21 до 25 |
| Процессор | Intel Atom @ 1.6 ГГц |
| Встроенная ОС | Linux |
| Совместимые ОС | Windows, Mac OS, Linux |
| Языки программирования | C++, Python, Java, MATLAB, Urbi, C, .Net |
| Зрение | Две камеры HD 1280×960 |
| Связь | Ethernet, Wi-Fi |
См. также
- ASIMO
- Manav
- Pepper
Ссылки
- Официальный сайт компании Aldebaran Robotics
- Канал на YouTube
- Статья о роботах NAO
![]()
Эта страница в последний раз была отредактирована 3 июня 2020 в 21:10.
Как только страница обновилась в Википедии она обновляется в Вики 2.
Обычно почти сразу, изредка в течении часа.
|
Робокубок, 2016 |
|
| Производитель | SoftBank Робототехника (ранее Aldebaran Robotics) |
|---|---|
| Страна | Франция |
| Год создания | 2008 (первая публичная версия) |
| Тип | Гуманоидный робот |
| Цель | Исследования, образование и развлечения |
N (произносится сейчас же) является автономным программируемым человекоподобный робот разработан французской компанией Aldebaran Robotics. робототехника компания со штаб-квартирой в Париж, который был приобретен SoftBank Group в 2015 году и был переименован в SoftBank Робототехника. Разработка робота началась с запуска проекта Нао в 2004 году. 15 августа 2007 года Нао заменил Sony собака-робот Aibo как робот, используемый в Робокубка Стандартная лига платформы (SPL), международный робот футбольный соревнование.[1] Nao использовался в RoboCup 2008 и 2009, а NaoV3R был выбран в качестве платформы для SPL на RoboCup 2010.[2]
С 2008 года было выпущено несколько версий робота. Nao Academics Edition была разработана для университетов и лабораторий в исследовательских и образовательных целях. Он был выпущен для организаций в 2008 году и стал общедоступным к 2011 году. С тех пор были выпущены различные обновления платформы Nao, в том числе Nao Next Gen 2011 года и Nao Evolution 2014 года.[3][4]
Роботы Nao используются в исследовательских и образовательных целях во многих академических учреждениях по всему миру. По состоянию на 2015 год более 5000 единиц Nao используются более чем в 50 странах.[4]
История развития
Aldebaran Robotics была основана в 2005 году Бруно Мезонье, который ранее начал разработку робота в рамках проекта «Нао» в 2004 году.[4] В период с 2005 по 2007 год было разработано шесть прототипов Nao. В марте 2008 года первая серийная версия робота Nao RoboCup Edition была представлена участникам RoboCup этого года.[5] Издание Nao Academics Edition было выпущено для университетов, учебных заведений и исследовательских лабораторий в конце 2008 года.
Летом 2010 года Нао попала в мировые заголовки благодаря синхронным танцевальным выступлениям в Шанхай Экспо в Китай.[6] В октябре 2010 г. Токийский университет приобрела 30 роботов Нао для своей лаборатории Накамура, надеясь превратить роботов в активных лаборантов.[7] В декабре 2010 года был продемонстрирован робот Nao, выполняющий стендап комедия рутина[8] и была выпущена новая версия робота со скульптурными руками и улучшенными моторами. В мае 2011 года Альдебаран объявил, что освобождает контрольный пакет Нао. исходный код общественности как Открытый исходный код программного обеспечения.[9] В июне 2011 года Альдебаран привлек 13 миллионов долларов США в рамках раунда венчурное финансирование во главе с Intel Capital.[10] В 2013 году Альдебаран был приобретен японским SoftBank Mobile за 100 миллионов долларов США.[11]
В декабре 2011 года компания Aldebaran выпустила модель Nao Next Gen с усовершенствованными аппаратными и программными средствами, такими как камеры высокой плотности, повышенная надежность, системы предотвращения столкновений и более высокая скорость ходьбы.[3] Nao Evolution, отличающийся повышенной надежностью, улучшенным синтезом многоязычной речи, улучшенной формой и обнаружение лица и распознавание с использованием новых алгоритмов, а также улучшенное определение местоположения источника звука с помощью четырех направленных микрофонов было выпущено в июне 2014 года.[4]
Aldeberan Robotics была приобретена SoftBank Group в 2015 году и был переименован в SoftBank Robotics.
Академическое и научное использование
С 2011 года более 200 академических институтов по всему миру использовали робота, в том числе Университет Хартфордшира и их Команда Робокубка Bold Hearts, то Индийский институт информационных технологий, Аллахабад, то Токийский университет,[7] то Индийский технологический институт Канпур,[12] Саудовская Аравия с Университет нефти и полезных ископаемых имени короля Фахда, Университет Южного Уэльса и Государственный университет Монтаны.[13][14] В 2012 году подаренные роботы Нао использовались для обучения аутичный дети в британской школе; некоторые дети находили детских выразительных роботов более привлекательными, чем люди.[15][16] В более широком контексте роботов Nao использовали многие британские школы для ознакомления детей с роботами и индустрией робототехники.[17]
К концу 2014 года более 5000 роботов Nao использовались в образовательных и исследовательских учреждениях 70 стран.[4] В 2015 г. Финансовая группа Mitsubishi UFJ начали испытания роботов Nao для обслуживание клиентов использовать в своих отделениях японского банка.[18] В июле 2015 года было показано, что роботы Нао демонстрируют базовую форму самосознания в философском эксперименте на Политехнический институт Ренсселера в Нью-Йорке, где были установлены три робота, заглушившие два из них; затем им сказали, что двоим из них дали «таблетку от немоты», и попросили выяснить, кто из них не принимал. Первоначально ответив, что он не знал, робот без звука смог понять, что ему не давали таблетку от немоты, услышав звук собственного голоса.[19] В сентябре 2015 г. Французский институт здоровья и медицинских исследований использовали роботов Нао для тестирования системы роботизированной «автобиографической памяти», предназначенной для обучения Международная космическая станция бригады и помощь пожилым пациентам.[20]
Nao доступен в качестве исследовательского робота для школ, колледжей и университетов, чтобы преподавать программирование и проводить исследования взаимодействия человека и робота.[21]
В августе 2018 года RobotLAB выпустила платформу онлайн-обучения для школ, которая расширяет возможности использования NAO в STEM, программировании и проектировании.[22]
Использование в здравоохранении
С момента своего выпуска в 2004 году Nao был протестирован и развернут в ряде сценариев здравоохранения, включая использование в домах престарелых.[23] и в школах.
дизайн
Различные версии платформы робототехники Nao имеют 2, 14, 21 или 25 степени свободы (DoF). Специальная модель с 21 степенями свободы и без задействованных рук была создана для соревнований Robocup. Все версии Nao Academics имеют инерциальная единица измерения с участием акселерометр, гирометр и четыре ультразвуковые датчики которые обеспечивают Нао стабильность и позиционирование в пространстве. Версии на ножках включали восемь силовые резисторы и два бампера. Nao Evolution 2014 года отличался более прочными металлическими соединениями, улучшенным захватом и усовершенствованной системой определения местоположения источника звука, в которой используются четыре направленных микрофона.[4]. Самая последняя версия, получившая название NAO6, была представлена в июне 2018 года. [24] [25]
Программного обеспечения
Робот Nao управляется специализированным Linux -на основании Операционная система, получивший название NAOqi.[4] ОС питает мультимедийную систему робота, которая включает четыре микрофона (для распознавание голоса и звуковая локализация ), два динамика (для многоязычного текст в речь синтез) и две камеры HD (для компьютерное зрение, включая распознавание лица и формы). Робот также поставляется с программным пакетом, который включает инструмент графического программирования, получивший название Хореграф,[26] пакет программного обеспечения для моделирования и комплект разработчика программного обеспечения. Nao, кроме того, совместим с Microsoft Robotics Studio, Киберботика Webots, а Гостай Студия (URBI ).[27]
В августе 2018 года RobotLAB выпустила Engage! K12. Это онлайн-платформа обучения для школ, которые расширяют возможности использования NAO для STEM, программирования и инженерии.[28] В феврале 2018 года финская компания Utelias Technologies выпустила Elias Robot, обучающее приложение, которое помогает изучать языки с помощью NAO. [29]
Характеристики
| Версия робота | Нао V3 + (2008) | Nao V3.2 (2009) | Nao V3.3 (2010) | Nao Next Gen (V4) (2011)[30] | Нао Эволюция (V5) (2014)[31] | Нао Пауэр 6 (V6) (2018)[32] |
|---|---|---|---|---|---|---|
| Рост | 573,2 миллиметра (22,57 дюйма) | 573 миллиметра (22,6 дюйма) | 574 миллиметра (22,6 дюйма) | |||
| Глубина | 290 миллиметров (11 дюймов) | 311 миллиметров (12,2 дюйма) | ||||
| Ширина | 273,3 миллиметра (10,76 дюйма) | 275 миллиметров (10,8 дюйма) | ||||
| Вес | 4,83592 килограмма (10,6614 фунта) | 4,996 кг (11,01 фунта) | 5,182530 кг (11,42552 фунта) | 5,305350006 кг (11,69629464 фунта) | 5,48 кг (12,1 фунта) | |
| Источник питания | литиевая батарея, обеспечивающая 27,6 Wh при 21,6 В | литиевая батарея 48,6 Wh при 21,6 В | литиевая батарея 62,5 Wh при 21,6 В | |||
| Автономия | 60 минут (активное использование) | 90 минут (активное использование) | ||||
| Степени свободы | 25[33] | |||||
| ЦПУ | x86 AMD GEODE 500 МГц | Intel Atom Z530 @ 1,6 ГГц | Intel Atom E3845 4 ядра @ 1,91 ГГц | |||
| ОЗУ | 256 МБ | 1 ГБ | 4 ГБ DDR3 | |||
| Место хранения | 2 ГБ флэш-памяти | 2 ГБ флэш-памяти + 8 ГБ Micro SDHC | 32 ГБ SSD | |||
| Встроенная ОС | OpenNAO 1.6 (на основе OpenEmbedded) | OpenNAO 1.8 (на основе OpenEmbedded) | OpenNAO 1.10 (на основе OpenEmbedded) | OpenNAO 1.12 (на основе Gentoo) | NAOqi 2.1 (на основе gentoo) | NAOqi 2.8 (на базе openembedded) |
| Совместимая ОС | Windows, Mac OS, Linux | |||||
| Языки программирования | C ++, Python, Ява, MATLAB, Урби, C, .Сеть | |||||
| Среда моделирования | Webots | |||||
| Камеры | Две камеры OV7670 58 ° DFOV | Две камеры MT9M114 72,6 ° DFOV | Две камеры HD OV5640 67,4 ° DFOV | |||
| Датчики | 36 MRE (магнитные поворотные энкодеры), использующие технологию датчика Холла, точность 12 бит, то есть 4096 значений на оборот, что соответствует точности около 0,1 °
2 х гирометра 1 ось 1 х акселерометр 3 оси 8 x FSR Force (чувствительные резисторы). 2 бампера на кончиках каждой ступни. Это простые переключатели ВКЛ / ВЫКЛ. Нет разницы между толчком левой или правой ногой. Гидролокатор: 2 излучателя, 2 приемника. Частота: 40 кГц. Чувствительность: -86 дБ. Разрешение: 10 мм. Дальность обнаружения: 0,25 — 2,55 м. Эффективный конус: 60 °. 2 x I / R Длина волны = 940 нм Угол излучения = +/- 60 ° Мощность = 8 мВт / ср 4 микрофона: Чувствительность: -40 +/- 3 дБ Диапазон частот: 20 Гц-20 кГц Соотношение сигнал / шум: 58 дБА 2 камеры: OV7670 VGA (640×480), 30 кадров в секунду. Диапазон фокусировки: 30 см — бесконечность. Угол обзора по диагонали 58 ° (47,8 ° по горизонтали, 36,8 ° по вертикали) Емкостной датчик |
36 x MRE (магнитные поворотные энкодеры), использующие технологию датчика Холла, точность 12 бит, то есть 4096 значений на оборот, что соответствует точности около 0,1 °
2 х гирометра 1 ось 1 х акселерометр 3 оси 8 x FSR (силовые резисторы). 2 бампера на кончиках каждой ступни. Это простые переключатели ВКЛ / ВЫКЛ. Нет разницы между толчком левой или правой ногой. Гидролокатор: 2 излучателя, 2 приемника. Частота: 40 кГц. Чувствительность: -86 дБ. Разрешение: 10 мм. Дальность обнаружения: 0,25 — 2,55 м. Эффективный конус: 60 °. 2 x I / R Длина волны = 940 нм Угол излучения = +/- 60 ° Мощность = 8 мВт / ср 4 микрофона: Чувствительность: -40 +/- 3 дБ Диапазон частот: 20 Гц-20 кГц Соотношение сигнал / шум: 58 дБА 2 камеры: MT9M114 960p (1280×960), 30 кадров в секунду Диапазон фокусировки: 30 см — бесконечность 72,6 ° Диагональное поле зрения (60,9 ° по горизонтали, 47,6 ° по вертикали) Емкостной датчик |
36 x MRE (магнитные поворотные энкодеры), использующие технологию датчика Холла, точность 12 бит, то есть 4096 значений на оборот, что соответствует точности около 0,1 °
3-осевой гирометр 3-осевой акселерометр 8 x FSR (силовые резисторы). 2 бампера на кончиках каждой ступни. Это простые переключатели ВКЛ / ВЫКЛ. Нет разницы между толчком левой или правой ногой. Гидролокатор: 2 излучателя, 2 приемника. Частота: 40 кГц Разрешение: 1-4 см (в зависимости от расстояния) Дальность обнаружения: 0,20 м — 3 м Эффективный конус: 60 ° 2 x I / R Длина волны = 940 нм Угол излучения = +/- 60 ° Мощность = 8 мВт / ср Четыре микрофона на голове Чувствительность 20 мВ / Па +/- 3 дБ при 1 кГц Диапазон частот от 150 Гц до 12 кГц 2 камеры: MT9M114 960p (1280×960), 30 кадров в секунду Диапазон фокусировки: 30 см — бесконечность 72,6 ° Диагональное поле зрения (60,9 ° по горизонтали, 47,6 ° по вертикали) Емкостной датчик |
36 x MRE (магнитные поворотные энкодеры), использующие технологию датчика Холла, точность 12 бит, то есть 4096 значений на оборот, что соответствует точности около 0,1 °
3-осевой гирометр 3-осевой акселерометр 8 x FSR (силовые резисторы). 2 бампера на кончиках каждой ступни. Это простые переключатели ВКЛ / ВЫКЛ. Нет разницы между толчком левой или правой ногой. Гидролокатор: 2 излучателя, 2 приемника. Частота: 40 кГц Разрешение: 1-4 см (в зависимости от расстояния) Дальность обнаружения: 0,20 м — 3 м Эффективный конус: 60 ° 2 х I / R. Длина волны = 940 нм. Угол выброса = +/- 60 °. Мощность = 8 мВт / ср 4 всенаправленных микрофона. Чувствительность: 250 мВ / Па +/- 3 дБ при 1 кГц Частота: от 100 Гц до 10 кГц (-10 дБ относительно 1 кГц) 2 x Камера: Характеристики Модель камеры OV5640 Тип Система на кристалле (SoC) CMOS-датчик изображения Разрешение матрицы изображения 5 МПОптический формат 1/4 дюйма Активные пиксели (HxV) 2592×1944 Чувствительность Размер пикселя 1,4 мкм * 1,4 мкм Динамический диапазон 68 дБ при 8-кратном усилении Соотношение сигнал / шум (макс. ) 36 дБ (максимум) Чувствительность 600 мВ / люкс-сек Выходная мощность Выход камеры 640 * 480 при 30 кадрах в секунду или 2560 * 1920 при 1 кадре в секунду Формат данных YUV и RGB Тип затвора Подвижный затвор Поле обзора 67,4 ° DFOV (56,3 ° HFOV, 43,7 ° VFOV) Тип фокусировки Авто фокус Емкостной датчик |
||
| Связь | Ethernet, Wi-Fi IEEE 802.11 a / b / g | Ethernet, Wi-Fi IEEE 802.11 a / b / g / n |
Смотрите также
- Альдебаран Робототехника (Французская Википедия )
- Образовательная робототехника
- Ромео (Французская Википедия )
- Перец (робот)
Роботы сопоставимой роли, конфигурации, размеров и эпохи
- Атлас (робот)
- Киробо
- Манав (робот)
- ICub
- InMoov
- QRIO
- REEM
- Роботис Биолоид
использованная литература
- ^ «Робот Nao заменяет AIBO в лиге стандартной платформы RoboCup». Engadget. 16 августа 2007 г. Дата обращения 4 октября 2012 г.
- ^ «Британские роботы готовятся к чемпионату мира». BBC. 25 октября 2010 г. Дата обращения 4 октября 2012 г.
- ^ а б «Aldebaran Robotics анонсирует гуманоидного робота Nao Next Gen». Engadget. 10 декабря 2011. Проверено 15 апреля 2012 года.
- ^ а б c d е ж г «Представление NAO Evolution: более сильного робота и более совершенной операционной системы». Альдебаран Робототехника. 2014. Архивировано с оригинал 1 февраля 2015 г.. Получено 1 февраля 2015.
- ^ «Лига стандартной платформы RoboCup». Tzi.de. Проверено 4 октября 2012 года.
- ^ «Робот-талисман развлекается на выставке Shanghai Expo». ChannelNewsAsia.com. 21 июня 2010. Проверено 4 октября 2012 года.
- ^ а б «Французский робот Nao fait ses classes à l’Université de Tokyo» В архиве 21 октября 2010 г. Wayback Machine (На французском). L’Express. Проверено 4 октября 2012 года.
- ^ «Хизер Найт: комедия на основе кремния». ТЕД. Декабрь 2010. Проверено 4 октября 2012 года.
- ^ «Альдебаран в открытый код НАО» В архиве 24 июля 2012 г. Wayback Machine. Нао Разработчик. 13 мая 2011. Проверено 4 октября 2012 года.
- ^ «Альдебаран привлекает 13 миллионов долларов в раунде во главе с Intel Capital». Альдебаран Робототехника. 2011. Проверено 4 октября 2012 года.
- ^ «Печальная история Альдебаранской робототехники Softbank и ее эмоционально-интеллектуального робота». RudeBaguette.com. 15 декабря 2012 г.. Получено 4 февраля 2015.
- ^ «Робот, который ходит, разговаривает, эмоции, как люди …» Нао‘«. Времена Индии. 4 февраля 2013 г.. Получено 8 февраля 2013.
- ^ Нэш, Одроу (23 января 2015 г.). «Роботы: Робот Луни». RobotsPodcast.com. Получено 10 февраля 2015.
- ^ «Nao, le robot que les universitys s’arrachent» (На французском). DigiSchool Média. 4 февраля 2013 г. Архивировано с оригинал 1 февраля 2014 г.. Получено 16 февраля 2013.
- ^ «Роботы в классе помогают детям с аутизмом учиться». BBC. 8 ноября 2012 г.. Получено 9 ноября 2012.
- ^ «АскНАО». Альдебаран Робототехника. Архивировано из оригинал 5 февраля 2015 г.. Получено 1 февраля 2015.
- ^ «Роботы найдены в классе». Active-Robots.com. 12 сентября 2014 г.. Получено 1 февраля 2015.
- ^ «Японский банк вводит роботов-рабочих для работы с клиентами в отделениях». Хранитель. 4 февраля 2015 г.. Получено 4 февраля 2015.
- ^ «Вежливые роботы демонстрируют проблеск самосознания». Популярная наука. 16 июля 2015 г. Проверено 23 декабря 2015 г.
- ^ «‘Автобиографическая память «позволяет роботам действовать как посредники знаний для экипажей МКС». Gizmag.com. 8 сентября 2015 г.. Получено 16 сентября 2015.
- ^ «Для образования и исследований». SoftBank Робототехника. Получено 30 сентября 2016.
- ^ «Запуск Engage! K12». Markets Insider. Получено 6 августа 2018.
- ^ https://www.express.co.uk/news/uk/958844/uk-care-homes-robots-elderly
- ^ «Пресс-кит НАО6 .PDF». SoftBank Robotics. Анонсирован 21 июня 2018 г.
- ^ «МОДЕЛЬ: H25600 Технические характеристики .PDF». SoftBank Robotics. Анонсирован 21 июня 2018 г.
- ^ Руководство пользователя Choregraphe. Альдебаран Робототехника. Проверено 1 февраля 2015 года.
- ^ «NAO NEXT Gen H25 Datasheet». Альдебаран Робототехника. Декабрь 2011. Проверено 4 октября 2012 года.
- ^ «Запуск Engage! K12». Markets Insider. Получено 6 августа 2018.
- ^ «Техно-учителя».
- ^ «Технический обзор NAO — документация NAO Software 1.14.5». doc.aldebaran.com. Получено 21 мая 2019.
- ^ «НАО — Строительство — Альдебаран 2.1.4.13 документация». doc.aldebaran.com. Получено 21 мая 2019.
- ^ «NAO Power V6 Standard Edition». RobotLAB. 2018 г.. Получено 1 августа 2018.
- ^ «Степени свободы НАО (3D анимация)». Получено 18 мая 2018.
внешние ссылки
- Официальный сайт Aldebaran Robotics и YouTube канал
- «Мой день с роботом». Новости BBC. 15 сентября 2015.
- Бланка Ли танцевальное представление с роботом Нао (Всемирный фестиваль науки )
- Космический центр Барбозы (проекты по изучению приключений на Марсе с Нао) www.BarbozaSpaceCenter.com

Робот NAO от компании Aldebaran Robotics
NAO — человекоподобный персональный робот высотой 58 см. Он предназначен для того, чтобы быть спутником по дому, двигаясь, узнавая вас, слушая вас и даже разговаривая с вами! С 2006 года он постоянно развивается, чтобы учить, развлекать, понимать и любить вас. Короче говоря, однажды станет вашим другом. Его гуманоидная форма и экстремальная интерактивность делают его привлекательным и привлекательным.

Попросите его что-то сделать, и он это сделает! Например, попросите NAO:
- Научит таблицы умножения вашим детям
- Поможет вам не проспать важную встречу/
- Следит за вашим домом в течение дня
- Научит вас новым вещам
- Вам больше не нужна клавиатура, компьютер или мышь для общения с технологией. Просто поговорите с ним, и он отвечает!
Ваш новый член семьи
Представьте, что NAO может научиться распознавать ваши настроения, чтобы он всегда знал, что нужно сказать; что он может знать членов вашей семьи и назвать их по их именам; вы можете научить его вашим музыкальным, пищевым и кино вкусам. Это цель Aldebaran: создать привлекательного, интерактивного компаньона и партнера. Его гуманоидная форма переносит вас в мир эмоций и заботы, его язык жестов дает ему жизнь и делает его привлекательным, и его способность взаимодействовать делает его новым членом семьи.

Информация о продукте:
- Марка и модель: Aldebaran NAO
- Производитель: SlashGear
Технические характеристики продукта
- Движение: 25 градусов
- Две (2) камеры
- Инерционный измерительный блок
- Сенсорный датчик
- Четыре (4) направленных микрофона