Вопросы § 23
Физика А.В. Перышкин
1.Приведите примеры колебательных движений.
В качестве примеров колебательных движений можно привести: движение иглы швейной машины, качелей, маятника часов; колебание деревьев и листьев под действием ветра; колебание струн музыкальных инструментов; биение сердца и дыхание.
2. Как вы понимаете утверждение о том, что колебательное движение периодично?
Утверждение о том, что колебательное движение периодично означает, что оно повторяется через определенные одинаковые промежутки времени.
3. Что называется механическими колебаниями?
Периодом колебаний называется минимальный промежуток времени, через который это движение повторяется.
4. Пользуясь рисунком 53, объясните, почему по мере приближения шарика к точке О с любой стороны его скорость увеличивается, а по мере удаления от точки О в любую сторону скорость шарика уменьшается.
При приближении шарика к точке О направлении скорости и ускорения шарика совпадают, поэтому скорость увеличивается. При удалении шарика от точки О скорость и ускорение разнонаправленны, поэтому скорость уменьшается. Ускорение обусловлено силой упругости.
5. Почему шарик не останавливается, дойдя до положения равновесия?
Шарик не останавливается так как он при прохождении точки равновесия обладает скоростью, но на него в этой точке не действует сила упругости.
6. Какие колебания называются свободными?
Свободными называются колебания происходящие благодаря только начальному запасу энергии.
7. Какие системы называются колебательными? Приведите примеры.
Колебательными системами называют такие системы тел, которые способны совершать свободные колебания.
Источник
Физика 9 класс. Колебательное движение
Колебательное движение. Свободное колебание. Величины, характеризующие колебательное движение.
Одним из видов неравномерного движения является колебательное движение.
Примеры колебательного движения:
движение иглы швейной машины, движение качелей, движение маятника часов.
Повторяющиеся через равные промежутки времени движения, при которых тело многократно и в разных направлениях проходит положение равновесия, называют механическими колебаниями.
Колебательное движение периодично. Промежуток времени, через который движение тела повторяется, называется периодом колебаний.
Колебания, происходящие только благодаря начальному запасу энергии, называются свободными колебаниями.
Свободно колеблющиеся тела всегда взаимодействуют с другими телами и вместе с ними образуют систему тел, которая называется колебательной системой. В результате взаимодействия тел, входящих в колебательную систему, и возникает сила, возвращающая колеблющееся тело к положению равновесия.
Одним из видов колебательных систем является маятник.
Маятник – это твердое тело, совершающее под действием приложенных сил колебания около неподвижной точки или вокруг оси.
Наибольшее (по модулю) отклонение колеблющегося тела от положения равновесия называется амплитудой колебаний.
Амплитуду обозначают буквой А и измеряют в СИ в единицах длины метрах(м), сантиметрах(см) и т.д.
Колеблющееся тело совершает одно полное колебание, если от начала колебаний проходит путь, равный четырем амплитудам.
Промежуток времени, в течение которого тело совершает одно полное колебание, называется периодом колебаний.
Период колебаний обозначается буквой T и в СИ измеряется в секундах (с).
Число колебаний в единицу времени называется частотой колебаний.
Частота колебаний обозначается буквой ν. За единицу частоты принято одно колебание в секунду. Эта единица называется Гц.
Чтобы найти период колебаний, необходимо 1 сек. разделить на число колебаний в эту секунду, т.е. на частоту колебаний.
Изучая движение маятников разной длины, можно сделать вывод, что частота и период свободных колебаний нитяного маятника зависят от длины его нити. Чем больше длина нити маятника, тем больше период колебаний и меньше частота.
Свободные колебания в отсутствие трения и сопротивления воздуха называются собственными колебаниями, а их частота – собственной частотой колебательной системы.
Любая колебательная система имеет определенную собственную частоту, зависящую от параметров этой системы.
собственная частота пружинного маятника зависит от массы груза и жёсткости пружины

Кроме амплитуды, частоты, периода колебаний еще одной характеристикой колебательного движения является фаза.
Если два одинаковых маятника, совершают движения и в любой момент времени их скорости направлены в разные стороны, говорят, что колебания маятников происходят в разных фазах. Если два одинаковых маятника совершают движения и направление их скоростей совпадают, то говорят, что маятники колеблются в одинаковых фазах. Возможно также колебания маятников с разностью фаз.
Конспект составлен на основании теоретического материала учебника «Физика 9 класс» А.В. Перышкин, Е.М. Гутник.
Источник
Описание устройства основных органов швейной машины, кинематические схемы

Описание устройства основных органов швейной машины, кинематические схемы.
Все швейные машины делятся на специальные и универсальные. Специальные машины выполняют только одну определенную технологическую операцию: выполнение петель, пришив пуговиц и т. д. На универсальных машинах можно выполнять швы различных видов, строчки разной длины и направления, используя специальные приспособления можно вы-полнять петли и т. д.
Рабочие органы швейной машины. Рабочими органами швейной машины являются: игла, двигатель ткани, лапка, нитепритягиватель, челнок.
Работу каждого рабочего органа швейной машины обеспечивает соответствующий механизм. Образование строчки обеспечивается слаженной работой всех механизмов. В их основе, лежат механизмы преобразования вращательного движения в возвратно-поступательное. Такими механизмами преобразования являются: кривошипно-шатунный, эксцентриковый, кулачковый.
Наиболее распространенным преобразователем вращательного движения махового колеса и главного вала в возвратно-поступательное движение иглы и наоборот является кривошипно-шатунный механизм, который используется в механизме иглы (рис. 1).

На рисунке 1 показан механизм иглы, в котором применен кривошипно-шатунный механизм. Кривошипом 3 является цилиндрический диск, который жестко закрепляется на главном валу 2 и вращается вместе с ним. На палец кривошипа 4 надет шатун 5, который представляет собой стержень с двумя головками. Верхнюю головку шатуна 5а надевают на палец кривошипа, а нижнюю головку шатуна 5б соединяют с пальцем поводка 6, который играет роль ползуна. Игловодитель 7 вставлен в поводок и закреплен установочным винтом. Игла 9 крепится в игловодителе при помощи прижимного винта 8.
Основные звенья кривошипно-шатунного механизма: кривошип, шатун и ползун.
Кривошип жестко закреплен на валу, совершает вращательное движение и является ведущим звеном. Шатун является связующей деталью между кривошипом и ползуном, соединение с ними подвижно-шарнирное, он совершает колебательные движения и является передаточным звеном. Ползун совершает возвратно-поступательное движение, которое посредством жесткого разъемного соединения передается игловодителю с иглой, он является ведомым звеном.
Рис. 1. Кривошипно-шатунный механизм:
а — механизм иглы, б — кинематическая схема механизма, 1—маховое колесо, 2— главный вал,
3— кривошип, 4— палец кривошипа, 5—шатун, 5а— верхняя головка шатуна, 56 — нижняя головка
шатуна, 6— поводок, 7— игловодитель, 8— прижимной винт, 9— игла.
Механизм двигателя ткани.
Механизм двигателя ткани (рис. 2) состоит из трех узлов: узла горизонтального перемещения, узла вертикального перемещения и узла лапки.

В узле горизонтального перемещения используется эксцентриковый механизм (рис. 2, а), который служит для преобразования вращательного движения в возвратно-поступательное или колебательное.
Основным звеном данного механизма является эксцентрик — круглый диск, ось вращения которого не совпадает с его геометрической осью. На рисунке 3 показана общая схема эксцентрикового механизма. При вращении главного вала 1 наиболее утолщенный участок эксцентрика будет пе-ремещаться по окружности по движению часовой стрелки. На рисунке он обращен вниз (I), влево (II), вверх (III) и вправо (IV). Как видно, схема движения эксцентрика сходна со схемой движения кривошипа и его пальца. Шатун 4 и его головка 3, надетая на эксцентрик 2, совершает колебательные движения. Ползун 5 совершает прямолинейные движения вверх и вниз по направляющим 6.
В швейной машине к узлу горизонтального перемещения (рис. 2) относится вал продвижения 15. Коромысло вала 5, соединенное с нижней головкой шатуна-вилки 4, получает движение от главного вала 1 через эксцентрик 2. При вращении главного вала шатун-вилка совершает колебательное движение. Шатун поднимается, и вместе с ним поднимается коромысло 5, поворачивая вал продвижения против часовой стрелки. Рычаг 13, закрепленный на левом конце вала, отклоняется вместе с валом и продвигает зубчатую вилку от работающего. Продольное перемещение рейки 14 регулируется с помощью рычага регулятора строки 3, который соединен с шатуном через шарнирный винт и одетый на него ползун. Ползун, в свою очередь, вставлен в паз рычага регулятора строчки. Опуская или поднимая рычаг, мы изменяем величину поворота шатуна, что при-водит к большому повороту вала продвижения, т. е. увеличивается продольное перемещение рейки и, следовательно, длина стежка.

Рис. 3. Общая схема эксцентрикового механизма:
1—главный вал, 2— эксцентрик, 3—головка шатуна, 4—шатун, 5— ползун, 6— направляющие.
Эксцентриковый механизм состоит из эксцентрика, шатуна-вилки и коромысла.
Эксцентрик жестко закреплен на валу и совершает вращательное движение, является ведущим звеном. Шатун-вилка (как и в кривошипно-шатунном механизме) совершает колебательные движения, соединение эксцентрика с шатуном и ша-туна с коромыслом — подвижное. Коромысло жестко закреплено на валу продвижения и совершает колебательные движе-ния, является ведомым звеном.
В узле вертикального перемещения применен кулачковый механизм, который служит для преобразования вращательного движения в сложное повторяющееся, совершающееся по определенному замкнутому циклу. Основной деталью данного механизма является кулачок (различают кулачки плоские (дисковые) и цилиндрические). При колебательных движениях (рис. 2, б) качающегося валика 7 кулачок 8 нажимает на рожки вилки 9, которые его охватывают. Вилка поворачивается вместе с валом подъема 10, поднимающим коромысло 11, на конце которого находится ролик 12, вставленный в вилку рычага двигателя ткани 13. При подъеме рычаг давит на верхний рожок вилки и поднимает его вместе с рейкой. Вал подъема получает движение от главного вала и качающегося валика, который, в свою очередь, получает движение от коленчатого вала через шатун. Его конструкция позволяет регулировать высоту подъема рейки в зависимости от толщины стачиваемых тканей.

Рейка работает с прижимной лапкой, которая должна с определенной силой прижимать ткань к рейке по всей ее площади. В узле лапки для этого имеется регулируемая пружина, а также детали, с помощью которых осуществляется подъем лапки и опускание ее на ткань. Прижимная лапка может быть с подвижной подошвой и с качающейся на шарнире. Такие лапки удобны тем, что позволяют легко проходить утолщенные места.
Узел лапки имеет следующее устройство (рис. 4). Прижимная лапка 8 прикреплена винтом к стержню 7. Над пружинодержателем 4 надета спиральная пружина 2, на которую сверху надавливает регулировочный винт 1. Под действием пружины лапка нажимает на ткань, сила прижима может быть изменена регулировочным винтом. Если винт поворачивать вправо, пружина, сжимаясь, создает большее давление лапки на ткань, и наоборот. Для подъема лапки в головке машины шарнирным винтом присоединен рычаг 5, снабженный кулачком. Если повернуть рычаг и подвести его кулачок под боковой отросток муфточки 3, то муфточка поднимется и поднимет стержень лапки и лапку.
Рис. 4. Механизм лапки:
а—узел лапки, б — кинематическая схема узла лапки: 1—регулировочный винт, 2— спиральная пружина, 3—отросток муфточки, 4—пружинодержатель, 5— рычаг, 6—7— стержни, 8— прижимная лапка.

Преобразование вращательного движения главного вала в колебательное движение челнока осуществляется с по-мощью механизма челнока (рис. 5). Движение главного вала посредством шатуна 2 преобразуется в колебательное движение качающегося валика 3. Ползуну 5, вставленному в вилку 4 качающегося валика, передается колебательное движение от ва-лика. Ползун перемещается в вилке и приводит в движение вал челнока 6. На левом конце челночного вала имеется обойма, куда вставляется челнок 7. При передаче колебательного движения с качающегося валика на вал челнока угол поворота вала увеличивается.
Рис. 5. Механизм челнока:
а — узел челнока, б — кинематическая схема механизма челнока. 1— кривошип, 2— шатун, 3— качающийся валик, 4— вилка, 5— ползун, 6— вал челнока, 7— обойма с челноком.

Механизмом нитепритягивателя осуществляется подача нитки и затяжка стежка. Ролик 3 (рис. 6) рычага нитепритя-гивателя скользит в пазу 4 цилиндрического кулачка 5. Рычаг 2 укреплен шарнирным винтом 7 в отверстии рукава машины, а его плечо, имеющее ушко 6 для прохождения нитки, выступает из прорези фронтовой доски.
При вращении кулачка ролик скользит по пазу и приводит в движение рычаг нитепритягивателя, который переме-щается вверх и вниз с переменной скоростью и участвует в процессе образования стежка —медленно подает нитку и дви-жется вниз, быстро поднимается вверх и затягивает стежок.
Рис. 6. Механизм нитепритягивателя:
а—узел механизма, б — кинематическая схема механизма нитепритягивателя:
1—главный вал, 2— рычаг, 3— ролик, 4— паз, 5— кулачок, 6— ушко, 7— шарнирный винт.
Процесс образования челночного стежка.

Челночный стежок образуется двумя нитками: игольной (верхней) и челночный (нижней). Одна из них (игольная) проходит сверху ткани, вторая (челночная) — снизу ткани. При образовании стежка переплетаемые нитки натягиваются и прижимают ткани друг к другу. Верхнюю нитку заправляют в ушко машинной иглы, а нижнюю наматывают на шпульку, которую вставляют в челнок. Схема образования челночного стежка (Рис. 7):
Рис. 7 Схема образования челночного стежка
Позиция I. Игла 1, проколов ткани, проводит верхнюю нитку под игольную пластину, при подъеме образуется петля, при этом нитепритягиватель 2 опускается до середины прорези и подает нитку.
Позиция II. Игла поднимается вверх, а носик челнока 3 захватывает петлю и, двигаясь по часовой стрелке, расширя-ет ее. Рычаг нитепритягивателя, опускаясь вниз, подает нитку челноку.
Позиция III. Челнок расширяет петлю верхней нитки и обводит ее вокруг шпульки. Нитепритягиватель, поднимаясь вверх, вытягивает нитку из челночного комплекта.
Позиция IV. Когда петля верхней нитки обойдет вокруг шпульки более чем на 180°, рычаг нитепритягивателя быст-ро поднимается вверх и затягивает стежок. Челнок начинает двигаться против часовой стрелки.
Позиция V. Зубья рейки 5 и лапка продвигают ткань, для того чтобы игла следующий свой прокол сделала на рас-стоянии, равном длине стежка.
Источник
Рабочие органы швейной машины
Рабочими органами швейной машины являются: игла, двигатель ткани, лапка, нитепритягиватель, челнок.
Работу каждого рабочего органа швейной машины обеспечивает соответствующий механизм. Образование строчки обеспечивается слаженной работой всех механизмов. В их основе лежат механизмы преобразования вращательного движения в возвратно-поступательное. Такими механизмами преобразования являются: кривошипно-шатунный, эксцентриковый, кулачковый.
Наиболее распространенным преобразователем вращательного движения махового колеса и главного вала в возвратно-поступательное движение иглы и наоборот является кривошипно-шатунный механизм, который используется в механизме иглы.
Общая схема кривошипно-шатунного механизма

1 — кривошип,
2 — главный вал,
3 — палец кривошипа,
4 — шатун,
5 — ползун,
6 — направляющие.
Если постепенно поворачивать вал 2 и кривошип 1 в направлении вращения часовой стрелки, то палец кривошипа 3 будет двигаться по окружности — из крайнего нижнего положения (I) он отходит влево и поднимается (II). Вместе с ним отклоняется влево шатун 4. Ползун 5 поднимается прямолинейно вверх, скользя по направляющим 6. При верхнем положении палец кривошипа, шатун и поводок будут находиться в крайнем верхнем положении (III). Затем палец опускается по правой части окружности. При этом шатун отклоняется вправо от средней линии и опускается, передавая ползуну движение вниз по направляющим (IV).
Кривошипно-шатунный механизм

а — механизм иглы,
б — кинематическая схема механизма:
На рисунке выше показан механизм иглы, в котором применен кривошипно-шатунный механизм. Кривошипом 3 является цилиндрический диск, который жестко закрепляется на главном валу 2 и вращается вместе с ним. На палец кривошипа 4 надет шатун 5, который представляет собой стержень с двумя головками. Верхнюю головку шатуна 5 а надевают на палец кривошипа, а нижнюю головку шатуна 5 б соединяют с пальцем поводка 6, который играет роль ползуна. Игловодитель 7 вставлен в поводок и закреплен установочным винтом. Игла 9 крепится в игловодителе при помощи прижимного винта 8.
Основные звенья кривошипно-шатунного механизма: кривошип, шатун и ползун.
Кривошип жестко закреплен на валу, совершает вращательное движение и является ведущим звеном. Шатун является связующей деталью между кривошипом и ползуном, соединение с ними подвижно-шарнирное, он совершает колебательные движения и является передаточным звеном. Ползун совершает возвратно-поступательное движение, которое посредством жесткого разъемного соединения передается игловодителю с иглой, он является ведомым звеном.
Механизм двигателя ткани

А — эксцентриковый механизм,
Б — кулачковый механизм,
а — механизм двигателя ткани,
б — кинематическая схема механизма:
На рисунке ниже показана общая схема эксцентрикового механизма.
Общая схема эксцентрикового механизма

При вращении главного вала наиболее утолщенный участок эксцентрика будет перемещаться по окружности по движению часовой стрелки. На рисунке он Обращен вниз (I), влево (II), вверх (III) и вправо (IV). Как видно, схема движения эксцентрика сходна со схемой движения кривошипа и его пальца.
Шатун 4 и его головка 3, надетая на эксцентрик 2, совершает колебательные движения. Ползун 5 совершает прямолинейные движения вверх и вниз по направляющим 6.
В швейной машине к узлу горизонтального перемещения относится вал продвижения 15.
Коромысло вала 11, соединенное с нижней головкой шатуна-вилки 4, получает движение от главного вала через эксцентрик 2. При вращении главного вала шатунвилка совершает колебательное движение.
Шатун поднимается, и вместе с ним поднимается коромысло 5, поворачивая вал продвижения против часовой стрелки. Рычаг 13, закрепленный на левом конце вала, отклоняется вместе с валом и продвигает зубчатую вилку от работающего. Продольное перемещение рейки 14 регулируется с помощью рычага регулятора строки 3, который соединен с шатуном через шарнирный винт и одетый на него ползун. Ползун, в свою очередь, вставлен в паз рычага регулятора строчки. Опуская или поднимая рычаг, мы изменяем величину поворота шатуна, что приводит к большому повороту вала продвижения, т. е. увеличивается продольное перемещение рейки и, следовательно, длина стежка.
Эксцентриковый механизм состоит из эксцентрика, шатуна-вилки и коромысла.
Эксцентрик жестко закреплен на валу и совершает вращательное движение, является ведущим звеном. Шатун-вилка (как и в кривошипно-шатунном механизме) совершает колебательные движения, соединение эксцентрика с шатуном и шатуна с коромыслом — подвижное. Коромысло жестко закреплено на валу продвижения и совершает колебательные движения, является ведомым звеном.
В узле вертикального перемещения применен кулачковый механизм, который служит для преобразования вращательного движения в сложное повторяющееся, совершающееся по определенному замкнутому циклу. Основной деталью данного механизма является кулачок (различают кулачки плоские (дисковые) и цилиндрические).
При колебательных движениях качающегося валика 7 кулачок 8 нажимает на рожки вилки 9, которые его охватывают. Вилка поворачивается вместе с валом подъема 10, поднимающим коромысло), на конце которого находится ролик 12, вставленный в вилку рычага двигателя ткани 13. При подъеме рычаг давит на верхний рожок вилки и поднимает его вместе с рейкой.
Вал подъема получает движение от главного вала и качающегося валика, который, в свою очередь, получает движение от коленчатого вала через шатун. Его конструкция позволяет регулировать высоту подъема рейки в зависимости от толщины стачиваемых тканей.
Рейка работает с прижимной лапкой, которая должна с определенной силой прижимать ткань к рейке по всей ее площади. В узле лапки для этого имеется регулируемая пружина, а также детали, с помощью которых осуществляется подъем лапки и опускание ее на ткань.
Прижимная лапка может быть с подвижной подошвой и с качающейся на шарнире. Такие лапки удобны тем, что позволяют легко проходить утолщенные места. Узел лапки имеет следующее устройство.
Механизм лапки

а — узел лапки,
б — кинематическая схема узла лапки:
Прижимная лапка 8 прикреплена винтом к стержню 7. Над пружино-держателем 4 надета спиральная пружина 2, на которую сверху надавливает регулировочный винт. Под действием пружины лапка нажимает на ткань, сила прижима может быть изменена регулировочным винтом. Если винт поворачивать вправо, пружина, сжимаясь, создает большее давление лапки на ткань, и наоборот.
Для подъема лапки в головке машины шарнирным винтом присоединен рычаг 5, снабженный кулачком. Если повернуть рычаг и подвести его кулачок под боковой отросток муфточки 3, то муфточка поднимется и поднимет стержень лапки и лапку.
Преобразование вращательного движения главного вала в колебательное движение челнока осуществляется с помощью механизма челнока.
Механизм челнока

а — узел челнока,
б — кинематическая схема механизма челнока:
Движение главного вала посредством шатуна 2 преобразуется в колебательное движение качающегося валика 3. Ползуну 5, вставленному в вилку 4 качающегося валика, передается колебательное движение от валика. Ползун перемещается в вилке и приводит в движение вал челнока 6. На левом конце челночного вала имеется обойма, куда вставляется челнок 7. При передаче колебательного движения с качающегося валика на вал челнока угол поворота вала увеличивается.
Механизмом нитепритягивателя осуществляется подача нитки и затяжка стежка. Ролик 3 рычага нитепритягивателя скользит в пазу 4 цилиндрического кулачка 5.
Механизм нитепритягивателя

а — узел механизма,
6 — кинематическая схема механизма нитепритягивателя:
Рычаг 2 укреплен шарнирным винтом 7 в отверстии 1 рукава машины, а его плечо, имеющее ушко 6 для прохождения нитки, выступает из прорези фронтовой доски.
При вращении кулачка ролик скользит по пазу и приводит в движение рычаг нитепритягивателя, который перемещается вверх и вниз с переменной скоростью и участвует в процессе образования стежка — медленно подает нитку и движется вниз, быстро поднимается вверх и затягивает стежок.
Вопросы
Источник
поделиться знаниями или
запомнить страничку
- Все категории
-
экономические
43,627 -
гуманитарные
33,648 -
юридические
17,917 -
школьный раздел
611,615 -
разное
16,897
Популярное на сайте:
Как быстро выучить стихотворение наизусть? Запоминание стихов является стандартным заданием во многих школах.
Как научится читать по диагонали? Скорость чтения зависит от скорости восприятия каждого отдельного слова в тексте.
Как быстро и эффективно исправить почерк? Люди часто предполагают, что каллиграфия и почерк являются синонимами, но это не так.
Как научится говорить грамотно и правильно? Общение на хорошем, уверенном и естественном русском языке является достижимой целью.
Библиографическое описание:
Гаппаров, Х. Г. Исследование малых колебаний в игольных механизмах швейных машин / Х. Г. Гаппаров, Х. К. Рашидов, М. Х. Гаппарова, Ф. О. Муродов. — Текст : непосредственный // Молодой ученый. — 2016. — № 4 (108). — С. 25-29. — URL: https://moluch.ru/archive/108/26122/ (дата обращения: 22.03.2023).
Для механизмов швейных машин характерны высокие скорости работы, большие ускорения, инерционные усилия движения, звеньев, нестабильные условия процесса и преимущественное применение низких кинематических пар.
Современная швейные машины выполняют до 130–150 переплетений нитей в секунду; кинематические циклы таких машин составляют 7–8 мс, а продолжительность многих этапов процесса менее 1 мс. Скорости мс движения рабочих органов и нитей измеряются десятками м/с, ускорения нити -600 м/с2. При этом частота вращения ведущих звеньев машин составляет 6000–8000 об/мин. Многие параметры c строчки и процессе работы — длина стежков, натяжение нитей, толщина и физико- механические свойства, сшиваемых деталей и нитей-изменяют по технологическим соображением; в машинах с отклоняющимся иглами, кроме того регулируется величина отклонения игл. Вследствие чего изменяются условий взаимодействия рабочих органов механизмов машин.
При проектирование и расчете механизмов переплетения нитей- также другие технологические требования-заданные структуру переплетений нитей, вид строчки, натяжение нитей, особенности их перемещения и многие динамические и конструктивные условия. Механизмы игл производит прокаливания сшиваемых материалов c одновременным проведением них нитей, образования петель-напусков и отклонение игл. В большинстве механизмов игл для прокаливания сшиваемых деталей образовано звеньев c низкими кинематическими парами, которые при высоких скоростях звеньев, возникают колебания отдельных звеньях целом в машины.
При выборы структуры игольного механизма целесообразно проанализировать влияние дезаксиала и расположения шатуна на движение иглы, а также установит рациональное число опор игл водителя, связанное созданием различных частоты колебания отдельных звеньев. Перемешенное игл водителя в зависимости от игла поворота кривошипа отсчитываемого от верного вертикального положения определятся по формуле:

где ![]()
![]() ;
; ![]() ,
, ![]() радиус кривошипа, длины шатуна и дезаксиал. Графики функции
радиус кривошипа, длины шатуна и дезаксиал. Графики функции ![]() (+) позволяет, судит о влиянии структуры механизма на продолжительность рабочего хода иглы. Параметры с
(+) позволяет, судит о влиянии структуры механизма на продолжительность рабочего хода иглы. Параметры с![]() и
и ![]() позволяет исследовать малых колебаний звеньев игольного механизма в процессе работ.
позволяет исследовать малых колебаний звеньев игольного механизма в процессе работ.
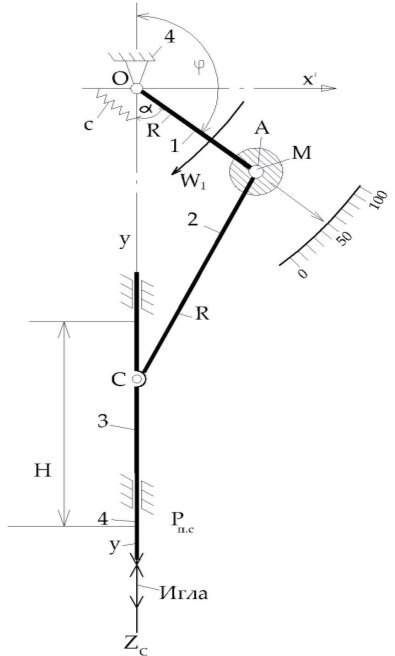
Рис. 1. Схема экспериментальной установки для определения малые колебания игольного механизма швейных машин: 1- кривошип, 2- шатун, 3- игловодитель, 4- стойка.
Одним из пути повышение надежности швейных машин является снижение колебания в шарнирах механизма иглы, работающих на высоких скоростях. На рис.1 показана универсальный широко применяемые тип игольного механизма швейных машин швейного и обувного производства легкой промышленности.
Кривошип 1 вращаясь, приводит во влияние шатуна 2, совершает возвратно поступательное движение вместе иглой 4.
В точки А кривошипа установлен прибор с измерительным устройством, во вращательном движение стрелки 1. Каждому положению игл водителя соответствуют определенное значение измеряемой величины, которое указываются стрелкой на шкале прибора (1). Это соответствие нарушается, если стойка кривошипа вибрирует. Тогда стрелка 1, совершает малые колебания относительно среднего положения, которые может не совпадать с положением, соответствующим статическому равновесию.
Обозначим через ![]() значение угла
значение угла ![]() , определяющее положение стрелки 1, при отсутствии вибрации стойки и через
, определяющее положение стрелки 1, при отсутствии вибрации стойки и через ![]() среднее значение угла
среднее значение угла ![]() при колебания кривошипа.
при колебания кривошипа.
Разность ![]() даёт динамическую ошибку в показаниях прибора. Такая же ошибка получается в случае, если к игл водителю механизма, звенья которого находились в положении статического равновесия, приложит периодически изменявшеюся силу
даёт динамическую ошибку в показаниях прибора. Такая же ошибка получается в случае, если к игл водителю механизма, звенья которого находились в положении статического равновесия, приложит периодически изменявшеюся силу ![]() т. е. усилие прокола материала.
т. е. усилие прокола материала.
Положение устойчивого статического равновесия звеньев игольного механизма соответствует минимум потенциальной энергии механизма иглы ![]() учитываем только массу
учитываем только массу ![]() , сосредоточенную в точке А и упругость пружины c, помешенной между стойкой и кривошипа 1:
, сосредоточенную в точке А и упругость пружины c, помешенной между стойкой и кривошипа 1:
![]() (1.1)
(1.1)
Где: ![]() обобщённая координата игольного механизма;
обобщённая координата игольного механизма;
![]() постоянная величина потенциальной энергии,
постоянная величина потенциальной энергии,
определяемое началом отсчета;
![]() коэффициент угловой (крутильной) жесткости пружины;
коэффициент угловой (крутильной) жесткости пружины;
![]() длины звеньев кривошипа и шатуна.
длины звеньев кривошипа и шатуна.
При двукратном дифференцировании выражения потенциальной энергии механизма по обобщённой координате получаем:
 (1.2.)
(1.2.)
 (1.3.)
(1.3.)
При условий ![]() положение устойчивого равновесия характеризуется корнем уравнения.
положение устойчивого равновесия характеризуется корнем уравнения.
![]() (1.4.)
(1.4.)
При определением кинематической энергии механизма иглы ![]() учитываем только энергию сосредоточенной массы
учитываем только энергию сосредоточенной массы ![]() :
:
![]() (1.5.)
(1.5.)
Исследуем сначала свободные колебания механизма иглы около положением статического равновесия, принимая её обобщённую координату отклонение
![]() (1.6.)
(1.6.)
Тогда выражение потенциальной энергии механизма (1.1.) принимает вид:
![]() (1.7.)
(1.7.)
Из разложения в ряд Маклерона в окрестности значения ![]() получаем приближеннее выражение потенциальной энергии механизма.
получаем приближеннее выражение потенциальной энергии механизма.
![]() (1.8.)
(1.8.)
Где штрихи обозначают дифференцирование по ![]() в дальней полагаем
в дальней полагаем ![]() , что соответствует изменению начало отсчёта потенциальной энергии механизма. Величина
, что соответствует изменению начало отсчёта потенциальной энергии механизма. Величина ![]() также равна нулю по условию (1.4.). Следовательно,
также равна нулю по условию (1.4.). Следовательно,
![]() (1.9.)
(1.9.)
т. е. квази упругой (обобщённой) коэффициент жесткости ![]() имеет вид:
имеет вид:
![]() (1.10)
(1.10)
Уравнение движение игольного механизма при свободных колебаниях имеет вид:
 или
или
![]() (1.11)
(1.11)
Следовательно, собственная частота игольного механизма
 (1.12)
(1.12)
Зависит от положение статического равновесия. При исследовании вынужденных колебаний представим обобщённую координату в виде суммы:
![]() (1.13)
(1.13)
Где: ![]() дополнительное перемещение,вызываемое периодически изменяющейся силой
дополнительное перемещение,вызываемое периодически изменяющейся силой ![]() .Подставляя значение
.Подставляя значение ![]() из соотношения (1.6.), получаем:
из соотношения (1.6.), получаем:
![]() (1.14)
(1.14)
При малых колебаниях можно заменит переменную величину ![]() её средним значением
её средним значением
 (1.15)
(1.15)
Где: ![]() период колебаний.
период колебаний.
Тогда ![]() , и вынужденные колебания можно рассматривать как колебания относительно положения динамического равновесия, определяемого углом
, и вынужденные колебания можно рассматривать как колебания относительно положения динамического равновесия, определяемого углом ![]() . Уравнение движения игольного механизма в этом случае имеет вид:
. Уравнение движения игольного механизма в этом случае имеет вид:
![]() (1.16)
(1.16)
где: ![]() приведённый к звену 1 момент от силы
приведённый к звену 1 момент от силы ![]() .
.
При равенстве длин кривошипа и шатуна перемещение игл водителясвязано с углом поворота ![]() соотношением
соотношением
![]() (1.17)
(1.17)
где: ![]() ход иглы, мм.
ход иглы, мм.
Отсюда передаточное отношение
![]()
приведённый момент ![]() находим из условия
находим из условия
![]()
или
![]() (1.18)
(1.18)
разложение в степенной ряд в окрестности ![]() даёт приближенное значение приведённого момента
даёт приближенное значение приведённого момента
![]() (1.19)
(1.19)
приближенное значение потенциальной энергии механизма теперь находим из разложения в ряд в окрестности ![]() или что тоже
или что тоже![]() :
:
![]()
отсюда
![]() (1.20)
(1.20)
подставляя выражения для ![]() и
и ![]() в уравнение (1.16) получаем уравнение малых колебаний игольного механизма при действии вынуждающий силы полезного сопротивления
в уравнение (1.16) получаем уравнение малых колебаний игольного механизма при действии вынуждающий силы полезного сопротивления ![]()
 (1.21)
(1.21)
полученное линейное уравнение с периодическим коэффициентом приводится к неоднородному уравнение Хилла. Если сила ![]() изменяется по гармоническому закону:
изменяется по гармоническому закону:
![]()
то уравнение (1.21) приводится к неоднородному уравнению
Матье
![]() (1.22)
(1.22)
где: ![]() постаянные величины.
постаянные величины.
Тогда
 (1.23)
(1.23)
По уравнение (1.23) можно исследовать устойчивости движения, используя свойства коэффициентов уравнения Матье.
При этой исследовании достаточно предположит, что положения динамического равновесия, т. е. значение угла ![]() находится в пределах рабочего диапазона. Для определения самой величины
находится в пределах рабочего диапазона. Для определения самой величины ![]() , характеризующей динамическую ошибку игольного механизма можно использовать приближенный метод, основанный на близости величин
, характеризующей динамическую ошибку игольного механизма можно использовать приближенный метод, основанный на близости величин ![]() и
и ![]() .
.
К рассмотрению уравнения (1.23) приводится также задача о влиянии возвратно поступательной вибрации стойки по гармоническому закону в направлением движения игл водителя, игольного механизма швейной машины.
Литература:
- Н. И. Левитский Теория механизмов и машин. М, «Наука» 1979, 576с
- Н. М. Вальщиков и др. Расчёт и проектирование машин швейного производства. Л, «Машиностроение» 1973, 344с.
- А. И. Комиссаров и др. Проектирование и расчёт машин обувных и швейных производств. М, «Машиностроение» 1978, 427с.
- И. Г. Русаков и др. Вынужденные колебания систем, ударяющихся об ограничитель. Журнал технической физики. Вып.11–12 1982.
Основные термины (генерируются автоматически): игольный механизм, потенциальная энергия механизма, обобщенная координата, статическое равновесие, значение угла, колебание, машина, положение, динамическая ошибка, динамическое равновесие.
Колебательные движения широко распространены в окружающей нас жизни. Колебания совершают раскачивающиеся качели (рис. (2)), маятник часов (рис. (3)), игла швейной машины (рис. (1)), крылья насекомых при полёте (рис. (4)) и многих других тел.

Рис. (1). Колебания иглы швейной машинки

Рис. (2). Колебания качелей

Рис. (3). Колебания маятника часов

Рис. (4). Колебания крыльев стрекозы
Конечно, движения этих тел многим и отличаются. Так качели совершают движение по дуге окружности, а игла швейной машины — по прямой; у крыльев стрекозы меньший размах, чем у маятника часов. Комариные крылья совершают большое количество колебаний за то же время, за которое качели могут совершить всего одно.
Эти движения объединяет свойство колеблющегося объекта повторять траекторию движения и находиться в одних и тех же точках через равные промежутки времени.
На анимации шарик, подвешенный на нити, совершает колебания (рис. (5)). Через равные промежутки времени он возвращается в одни и те же точки траектории. Затем движение повторяется, т.е. оно является периодичным.

Рис. (5). Колебания математического маятника
Интервал времени, через который движение тела полностью повторяется, называют периодом.
За один период колеблющееся тело дважды проходит положение равновесия.
Механические колебания — повторяющееся механическое движение тела около положения равновесия.
Положение равновесия — состояние системы с минимальной энергией.
В положении равновесия система может находиться сколь угодно долго.
Чтобы колебательные движения начались, нужно вывести тело (систему) из положения равновесия, изменить энергетическое состояние, дать толчок, что приводит к сообщению телу некоторого запаса энергии. За счёт этой энергии и происходят колебания.
Пример:
чтобы заставить качели совершать колебательные движения, нужно сначала вывести их из положения равновесия, оттолкнувшись ногами, либо сделать это руками.
Колебания, происходящие благодаря только начальному запасу энергии колеблющегося тела при отсутствии внешних воздействий на него, называются свободными колебаниями.
Пример:
примером свободных колебаний тела являются колебания груза, подвешенного на пружине. Первоначально выведенный из равновесия внешними силами груз в дальнейшем будет колебаться только за счёт внутренних сил системы «груз-пружина» — силы тяжести и силы упругости.
Условия возникновения свободных колебаний в системе:
а) система должна находиться в положении устойчивого равновесия: при отклонении системы от положения равновесия должна возникать сила, стремящаяся вернуть систему в положение равновесия — возвращающая сила;
б) наличие у системы избыточной механической энергии по сравнению с её энергией в положении равновесия;
в) избыточная энергия, полученная системой при смещении её из положения равновесия, не должна быть полностью израсходована на преодоление сил трения при возвращении в положение равновесия, т. е. силы трения в системе должны быть достаточно малы.
Физическая система — множество взаимосвязанных элементов, отделённых от окружающей среды, взаимодействующих с ней как целое.
Примеры физических систем:
- атом состоит из протонов, нейтронов и электронов;
- математический маятник состоит из подвеса и тела, имеющего массу;
- твёрдое тело состоит из молекул или атомов.
Колебательная система — физическая система, в которой могут существовать свободные колебания.
Колебательные движения основаны на действии возвращающей силы, которая является суммой остальных сил. Например, сила тяжести и сила упругости математического маятника.
Пример:
Рассмотрим колебания шарика на нити (рис. (6)). При отклонении шарика от положения равновесия свободные колебания возникают под действием силы тяжести и силы упругости. Равнодействующая этих сил направлена к положению равновесия.

Рис. (6). Силы, действующие на шарик
Шарик на нити является колебательной системой, так же как и маятник.
Маятник — твёрдое тело, совершающее колебания под действием приложенных сил около положения равновесия.
Пример:
груз, подвешенный на пружине и совершающий колебательные движения по вертикали под действием сил упругости, называется пружинным маятником (рис. (7)).

Рис. (7). Колебания пружинного маятника
Источники:
Рис. 1. Колебания иглы швейной машинки.
Рис. 2. Колебания качелей.
Рис. 3. Колебания маятника час.
Рис. 4. Колебания крыльев стрекозы.
Рис. 5. Колебания математического маятника.
Рис. 6. Силы, действующие на шарик. © ЯКласс.
Рис. 7. Колебания пружинного маятника.
Найди верный ответ на вопрос ✅ «какое из перечисленных ниже явлений являются механическими колебаниями? 1) падение яблока с ветки на землю 2) движение Луны вокруг Земли 3) …» по предмету 📙 Физика, а если ответа нет или никто не дал верного ответа, то воспользуйся поиском и попробуй найти ответ среди похожих вопросов.
Искать другие ответы
Главная » ⭐️ Физика » какое из перечисленных ниже явлений являются механическими колебаниями? 1) падение яблока с ветки на землю 2) движение Луны вокруг Земли 3) движение иглы швейной машины во время работы 4) продолжение движения автомобиля после нажатия тормоз
Вопрос по физике:
1.Какое из перечисленных ниже движений является механическим колебанием?
а) движение груга на пружине
б)движение мяча падающего на землю
в)движение иглы швейной машины.
(возможно несколько вариантов)
2.Какиеизперечисленныхниже колебаний являютсясвободными?
а) колебания груза, подвешенного к пружине, после однократного его отклонения от положения равновесия.
б)колебания диффузора громкоговорителя во время работы приемника
в) колебания груза на нити, один раз отведенного от положения равновесия и отпущенного.